Commandes du TI-Innovator™ Rover, version 1.5
Prérequis : Utilisez d'abord la commande Send "Connect RV"
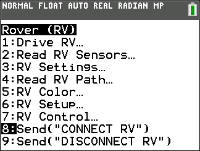
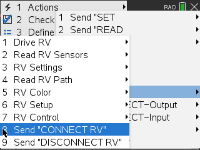
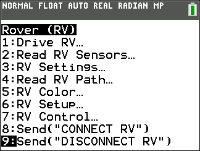
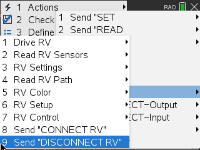
La commande « CONNECT RV » doit être utilisée en premier lors de l'utilisation du Rover. La commande « CONNECT RV » configure le logiciel du TI-Innovator™ Hub pour opérer avec le TI-Innovator™ Rover.
Il établit les connexions aux différents dispositifs sur le Rover - deux moteurs, deux encodeurs, un gyroscope, une DEL RVB et un capteur de couleur. Il efface également les différents compteurs et les valeurs des capteurs. Le paramètre « MOTORS », optionnel, configure uniquement les moteurs et permet le contrôle direct des moteurs sans les périphériques supplémentaires.
CONNECT RV - initialise les connexions du matériel.
|
•
|
Connecte le RV et les entrées et sorties intégrées au RV. |
|
•
|
Réinitialise le chemin (Path) et l'origine de la grille (Grid Origin). |
|
•
|
Fixe à 10 le nombre d'unités par mètre par défaut. Unité par défaut de la grille = 10 cm. |
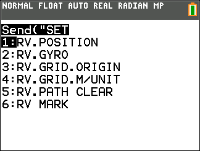
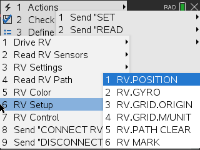
Désignation des sous-systèmes RV
L'objet RV contient plusieurs sous-systèmes directement adressés par nom. Ces sous-systèmes sont constitués par les roues et par les capteurs qui permettent au Rover de percevoir le monde.
Les sous-systèmes sont répertoriés par leur nom dans le tableau suivant.
|
RV
|
L'objet RV dans son ensemble.
|
|
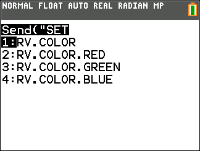
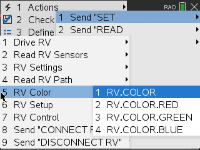
RV.COLOR
|
La DEL RVB tricolore sur la surface supérieure du Rover peut être contrôlée via les programmes utilisateur pour afficher n'importe quelle combinaison de couleurs.
|
|
RV.COLORINPUT
|
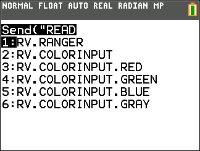
Le capteur de couleurs est dans la partie inférieure du Rover et est utilisé pour détecter la couleur de la surface.
|
|
RV.RANGER
|
Le capteur de distance à ultrasons orienté vers l'avant. Convertit les mesures en mètres. ~10,00 mètres signifie qu'aucun obstacle n'a été détecté.
|
|
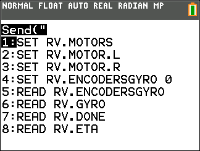
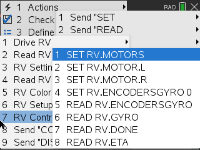
RV.ENCODERGYRO
|
Les encodeurs rotatifs (un sur chaque moteur) mesurent la distance parcourue par le Rover.
Les encodeurs gauche et droit, couplés au gyroscope et les informations sur le temps de fonctionnement.
|
|
RV.GYRO
|
Le gyroscope est utilisé pour maintenir la direction du Rover pendant son déplacement. Il peut également être utilisé pour mesurer le changement d’angle dans les virages.
|
|
RV.MOTOR.L
|
Moteur et contrôle de la roue gauche pour une utilisation directe du contrôle (avancé).
|
|
RV.MOTOR.R
|
Moteur et contrôle de la roue droite pour une utilisation directe du contrôle (avancé).
|
|
RV.MOTORS
|
Les moteurs GAUCHE et DROIT, gérés comme un seul objet pour un contrôle direct (avancé).
|
Catégories de Commande du Rover
Les commandes du Rover entrent dans deux catégories :
|
1.
|
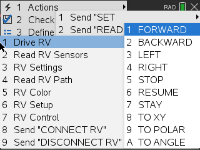
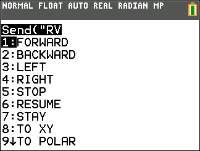
Exécution mise en file d’attente : Toutes les commandes de mouvement du Rover (FORWARD, BACKWARD, LEFT, RIGHT, ANGLE) sont mises en file d’attente sur le TI-Innovator Hub. Elles peuvent être exécutées ultérieurement. |
|
2.
|
Exécution immédiate : Les autres commandes (comme celles pour lire les capteurs ou configurer la DEL RVB sur le Rover) sont exécutées immédiatement. |
Cela signifie que certaines instructions dans votre programme s’exécuteront avant des instructions qui s’affichent plus tôt dans le programme, surtout si ces dernières commandes font partie de la famille mise en file d’attente.
Par exemple, dans le programme ci-dessous, la DEL RVB s’allumera ROUGE avant que le Rover ne s’arrête de bouger :
Send "SET RV.COLOR 255 0 255" - immédiatement exécuté
Send "RV FORWARD 5" - commande en file d'attente
Send "RV LEFT 45" - commande en file d'attente
Send "RV RIGHT 90" - commande en file d'attente
Send "SET RV.COLOR 255 0 0" - immédiatement exécuté
Exemple :
Pour changer de couleur après un mouvement « FORWARD », utilisez le paramètre « TIME » avec « WAIT ».
Send "RV FORWARD TIME 5"
WAIT 5
Send "SET RV.COLOR 255 0 255"
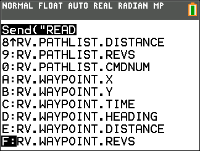
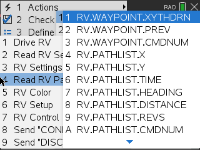
Commandes du RV, exemples de code et syntaxe
Les exemples suivants montrent comment diverses commandes du RV sont utilisées. Partout où une commande SET est utilisée, le SET peut être supprimé (utilisation facultative).
Exemples de code
Si « Exemple de code » s’affiche dans une table de commandes, cet « Exemple de code » peut être copié et collé tel quel pour être envoyé à votre calculatrice graphique afin d’être utilisé dans vos calculs.
Par exemple :
|
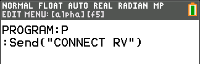
Exemple
de code :
|
Send ("RV FORWARD 5")
Send ("RV FORWARD SPEED 0.2 M/S TIME 10")
|
|
|
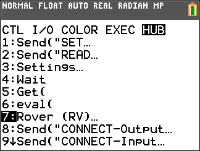
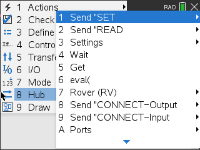
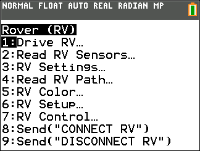
Rover (RV)...
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
|
|
|

|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices
|
TI‑Nspire™ CX
|
|
|
CE Calculatrices

|
TI‑Nspire™ CX
|