Pré-requisitos: Use o comando Enviar "Connect RV" em primeiro lugar
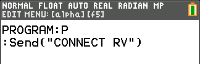
O comando “CONNECT RV” precisa de ser usado em primeiro lugar quando usar o Rover. O comando “CONNECT RV” configura o software TI-Innovator™ Hub para trabalhar com o TI-Innovator™ Rover.
Estabelece as conexões para os vários dispositivos no Rover - dois motores, dois codificadores, um giroscópio, um LED RGB e um sensor de cor. Também limpa os vários contadores e valores dos sensores. O parâmetro 'MOTORS' opcional configura apenas os motores e permite o controlo direto de motores sem os periféricos adicionais.
CONNECT RV - inicializa as conexões de hardware.
| • | Conecta o RV e as entradas e saídas incorporadas no RV. |
| • | Redefine o Caminho e a Origem do referencial |
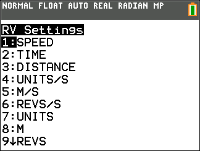
| • | Define as unidades como metro para o valor por defeito 10. Unidade por defeito do referencial = 10cm. |
Subsistemas RV Nomeados
O objeto RV contém vários subsistemas que são endereçados diretamente pelo nome. Estes subsistemas consistem em rodas e sensores que permitem ao Rover sentir o mundo.
Os subsistemas estão listados por nome na tabela a seguir.
|
Nome do Subsistema |
Descrição do Subsistema |
|---|---|
|
RV |
O objeto RV como um todo. |
|
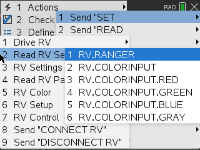
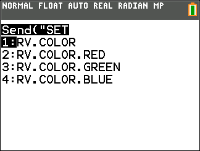
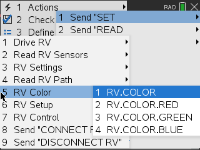
RV.COLOR |
O LED RGB tricolor na superfície superior do Rover pode ser controlado através de programas do utilizador para exibir qualquer combinação de cores. |
|
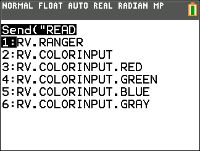
RV.COLORINPUT |
O sensor de cores está na parte inferior do Rover e é usado para detetar a cor da superfície. |
|
RV.RANGER |
O sensor de movimento ultrassónico frontal. Retorna as medições em metros. ~10,00 metros significa que nenhum obstáculo foi detetado. |
|
RV.ENCODERGYRO |
Os codificadores rotativos – um em cada motor – medem a distância percorrida pelo Rover. O codificador esquerdo e direito, juntamente com o giroscópio e informações de tempo de operação. |
|
RV.GYRO |
O giroscópio é usado para manter a posição do Rover enquanto está em movimento. Também pode ser usado para medir a mudança de ângulo durante as viragens. |
|
RV.MOTOR.L |
Motor de roda esquerda e controlo para uso de controlo direto (avançado). |
|
RV.MOTOR.R |
Motor de roda direita e controlo para uso de controlo direto (avançado). |
|
RV.MOTORS |
Ambos os motores ESQUERDO e DIREITO, geridos como um único objeto para uso de controlo direto (avançado). |
Categorias de Comandos do Rover
Os comandos do Rover dividem-se em duas categorias:
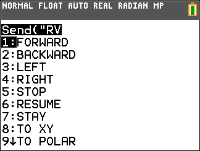
| 1. | Execução em fila: Todos os comandos de movimento Rover – PARA A FRENTE, PARA TRÁS, ESQUERDA, DIREITA, ÂNGULO – estão em fila no TI-Innovator Hub. Podem ser executados no futuro. |
| 2. | Execução imediata: Outros comandos – como aqueles para ler os sensores ou definir o LED RGB no Rover – são executados imediatamente. |
Isto significa que certas instruções no seu programa serão executadas antes de instruções que apareçam no início do programa, especialmente se os últimos comandos forem parte da família em fila.
Por exemplo, no programa abaixo, o LED RGB mudará para VERMELHO antes do Rover parar:
Send "SET RV.COLOR 255 0 255" - executado imediatamente
Send "RV FORWARD 5" - comando em fila
Send "RV LEFT 45" - comando em fila
Send "RV RIGHT 90" - comando em fila
Send "SET RV.COLOR 255 0 0" - executado imediatamente
Exemplo:
Para mudar de cor após um movimento "FORWARD", use o parâmetro "TIME" com "WAIT".
Send "RV FORWARD TIME 5"
WAIT 5
Send "SET RV.COLOR 255 0 255"
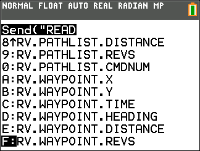
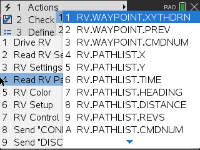
Comandos RV, Amostras de Código e Sintaxe
Os exemplos a seguir mostram como vários comandos são usados para o RV. Quando um comando SET for usado, o SET pode ser deixado de fora (uso opcional).
Amostras de código
Quando vir “Amostra de Código” na tabela de comandos, esta “Amostra de Código” deve ser copiada e colada, tal como está, para ser enviada para a sua calculadora gráfica para uso nos seus cálculos.
Exemplo:
|
Amostra de |
Send ("RV FORWARD 5") Send ("RV FORWARD SPEED 0.2 M/S TIME 10")
|
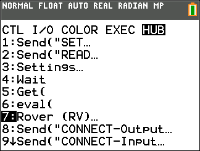
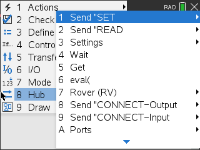
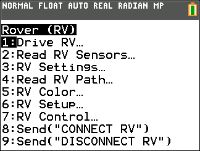
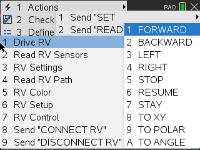
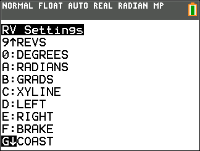
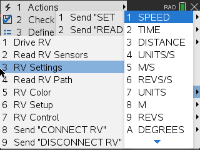
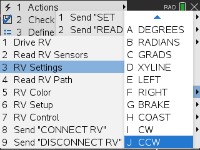
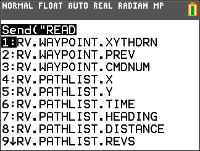
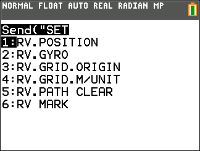
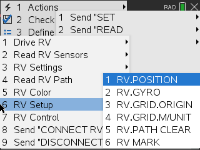
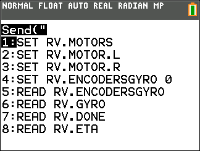
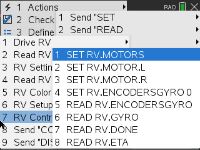
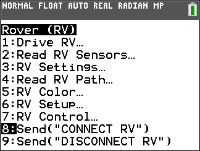
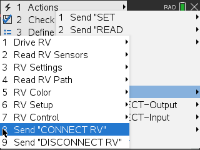
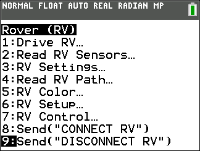
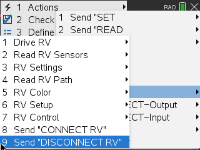
Menu TI-Innovator™ Rover |
|||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|||||||||||||||||||||||||||||
Rover (RV)... |
CE Calculadoras
|
TI‑Nspire™ CX
|
|||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()
|
CE Calculadoras
|
TI‑Nspire™ CX
|

![]()