Reading WAYPOINT and PATH
Rastrear o Caminho RV
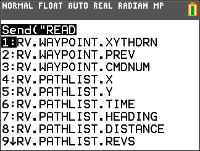
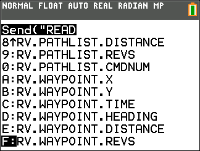
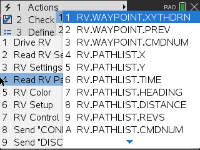
Para suportar a análise do Rover durante e após um funcionamento, o sketch medirá automaticamente as seguintes informações para cada comando de Condução:
| • | Coordenada X no referencial virtual |
| • | Coordenada Y no referencial virtual |
| • | Tempo em segundos que o comando atual tem estado a executar. |
| • | Distância em unidades de coordenadas para o segmento do caminho. |
| • | Direção em graus (termos absolutos medidos no sentido anti-horário com o eixo X como 0 graus. |
| • | Rotações pela roda na execução do comando atual |
| • | O número do comando, rastreia o número de comandos executados, começa com 0. |
Os valores de Caminho serão armazenados em listas, começando com os segmentos associados com os primeiros comandos e indo para os segmentos associados aos comandos mais recentes.
O comando de condução em andamento, a LOCALIZAÇÂO, atualizará repetidamente o último elemento nas listas de Caminho, à medida que o Rover avança em direção ao último ponto de interesse.
Quando um comando de unidade é completado, uma nova localização é iniciada e a dimensão das listas de Caminho é incrementada.
Nota: Isso implica que, quando todos os comandos da unidade na fila estiverem concluídos, será iniciada automaticamente outra localização para o estado parado. Isto é semelhante à posição inicial onde o RV está parado e a contar o tempo.
Número máximo de locais: 80
Posição RV e Caminho
| • | Capacidade de ler coordenadas X, Y, Direção, Tempo e Distância para cada comando de condução em execução. |
| • | Armazena o histórico de caminho em listas para traçar e analisar |
Nota: A escala do referencial pode ser definida pelo utilizador, sendo por defeito de 10 cm por unidade. O utilizador terá opções para definir a origem do referencial
Comandos para Read RV Path…
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()