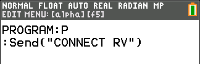
Voorwaarde: Gebruik eerst de opdracht Send "Connect RV"
De opdracht ‘CONNECT RV’ moet als eerste worden gebruikt wanneer de Rover wordt gebruikt. De opdracht ‘CONNECT RV’configureert de TI-Innovator™ Hub software om met de TI-Innovator™ Rover te werken.
Het brengt de verbindingen met de verschillende apparaten op de Rover tot stand – twee motoren, twee encoders, één gyroscoop, één RGB LED en één kleurensensor. Het wist ook de verschillende tellers en sensorwaarden. De optionele ‘MOTORS’-parameter configureert alleen de motoren en maakt directe besturing van de motoren mogelijk zonder de extra randapparatuur.
CONNECT RV - initialiseert de hardware-verbindingen.
| • | Sluit de RV aan en de, in de RV ingebouwde, ingangen en uitgangen. |
| • | Reset het pad en de oorsprong van het rooster. |
| • | Stelt de eenheden per meter in op de standaardwaarde 10. Standaard roostereenheid = 10 cm. |
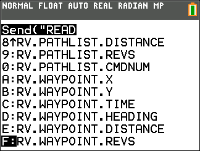
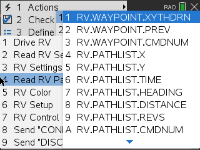
RV-subsystemen met naam
Het RV-object bevat verschillende subsystemen die direct via hun naam worden aangeroepen. Deze subsystemen bestaan uit de wielen en sensoren die de Rover de wereld laten 'ervaren'.
De subsystemen zijn met hun naam opgenomen in de volgende tabel.
|
Naam subsysteem |
Beschrijving van subsysteem |
|---|---|
|
RV |
Het RV-object in zijn geheel. |
|
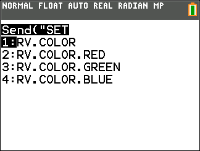
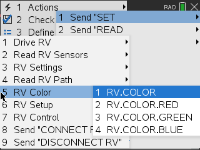
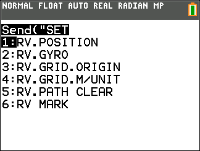
RV.COLOR |
De driekleurige RGB LED aan de bovenkant van de Rover kan worden bestuurd via gebruikersprogramma’s om elke willekeurige kleurencombinatie weer te geven. |
|
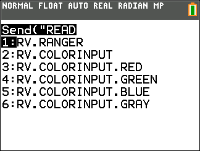
RV.COLORINPUT |
De kleurensensor bevindt zich aan de onderkant van de Rover en wordt gebruikt voor het detecteren van de kleur van het oppervlak. |
|
RV.RANGER |
De naar voren gerichte ultrasoon afstandssensor. Geeft metingen in meters. ~10.00 meters betekent dat er geen obstakel is gedetecteerd. |
|
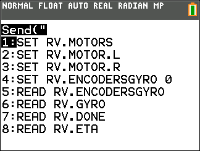
RV.ENCODERGYRO |
De draaiende encoders, één op elke motor, meten de afgelegde afstand door de Rover. De linker- en rechter-encoder, samen met de gyroscoop en bewerkingstijdinformatie. |
|
RV.GYRO |
De gyroscoop wordt gebruikt voor het handhaven van de richting van de Rover wanneer deze in beweging is. Hij kan ook worden gebruikt voor het meten van de verandering van de hoek tijdens het maken van bochten. |
|
RV.MOTOR.L |
Motor van het linkerwiel en bediening voor gebruik van (geavanceerde) directe besturing. |
|
RV.MOTOR.R |
Motor van het rechterwiel en bediening voor gebruik van (geavanceerde) directe besturing. |
|
RV.MOTORS |
Zowel de linker- (LEFT) als rechtermotor (RIGHT), beheerd als een enkel object voor gebruik van (geavanceerde) directe besturing. |
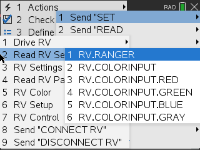
Rover opdrachtcategorieën
De opdrachten van de Rover vallen in twee categorieën:
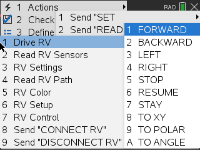
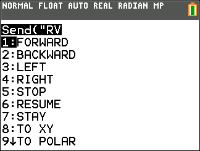
| 1. | Uitvoering vanuit wachtrij: Alle bewegingsopdrachten van de Rover, zoals FORWARD, BACKWARD, LEFT, RIGHT, ANGLE, worden in de wachtrij geplaats op de TI-Innovator Hub. Zij worden mogelijk op een later moment uitgevoerd. |
| 2. | Directe uitvoering: Andere opdrachten, zoals de opdrachten voor het uitlezen van de sensoren of het instellen van de RGB-LED op de Rover, worden onmiddellijk uitgevoerd. |
Dit betekent dat bepaalde instructies in uw programma worden uitgevoerd vóór instructies die eerder in het programma voorkomen, met name als de laatstgenoemde opdrachten deel uitmaken van de serie opdrachten die vanuit de wachtrij worden uitgevoerd.
In het onderstaande programma, wordt bijvoorbeeld, de RGB-LED ROOD voordat de Rover stopt met bewegen:
Send "SET RV.COLOR 255 0 255" – direct uitgevoerd
Send "RV FORWARD 5" – opdracht in wachtrij
Send "RV LEFT 45" – opdracht in wachtrij
Send "RV RIGHT 90" – opdracht in wachtrij
Send "SET RV.COLOR 255 0 0" – direct uitgevoerd
Voorbeeld:
Om de kleur te wijzigen na een beweging ‘FORWARD‘, gebruik de ‘TIME’ parameter met ‘WAIT’.
Send "RV FORWARD TIME 5"
WAIT 5
Send "SET RV.COLOR 255 0 255"
RV-opdrachten, programmeervoorbeelden en syntax
De volgende voorbeelden laten zien hoe verschillende opdrachten voor de RV worden gebruikt. Overal waar een opdracht SETwordt gebruikt, kan het SET-gedeelte worden weggelaten (optioneel gebruik).
Codeer voorbeelden
Als u ‘Programma-voorbeeld’ ziet in een tabel met opdrachten, kan dit ‘programma-voorbeeld’ worden gekopieerd en geplakt in de huidige vorm om te verzenden naar uw grafische rekenmachine voor gebruik in uw berekeningen.
Voorbeeld:
|
Programma- |
Send ("RV FORWARD 5") Send ("RV FORWARD SPEED 0.2 M/S TIME 10")
|
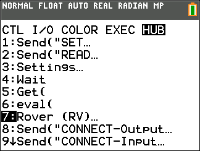
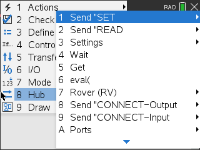
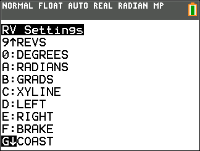
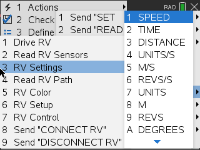
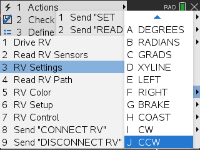
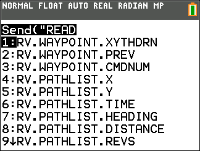
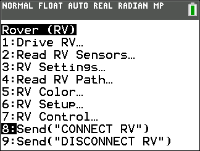
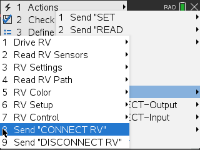
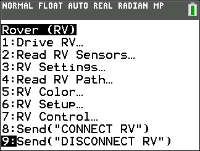
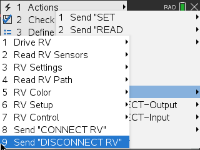
TI-Innovator™ Rover menu |
|||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|||||||||||||||||||||||||||||
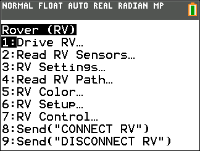
Rover (RV)... |
CE Rekenmachines
|
TI‑Nspire™ CX
|
|||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||
![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|
![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|
![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|
![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|
![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|
![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|

![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|

![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|
![]()
|
CE Rekenmachines
|
TI‑Nspire™ CX
|

![]()