WAYPOINT en PAD aan het lezen
Volgen van het pad van de RV
Om de analyse van de Rover tijdens en na een run te ondersteunen, zal de sketch automatisch de volgende informatie voor iedere stuuropdracht meten:
| • | X-coördinaat op virtueel rooster |
| • | Y-coördinaat op virtueel rooster |
| • | Tijd in seconden dat de huidige opdracht in uitvoering is. |
| • | Afstand in coördinaat-eenheden voor het lijnstuk van het pad. |
| • | Koers in graden (absoluut en tegen de klok in gemeten met de X-as als 0 graden. |
| • | Omwentelingen van het wiel tijdens de uitvoering van de huidige opdracht |
| • | Opdracht-nummer, houdt het aantal uitgevoerde opdrachten bij, te beginnen bij 0. |
De waarden van het pad worden opgeslagen in lijsten, te beginnen bij de lijnstukken verbonden met de eerste opdrachten en lopend tot aan de lijnstukken verbonden met de laatste opdrachten.
De stuuropdracht in uitvoering, het WAYPOINT, zal herhaaldelijk het laatste element in de padlijsten bijwerken terwijl de Rover zich in de richting van het laatste 'waypoint' beweegt.
Wanneer een stuuropdracht is voltooid, wordt met een nieuw waypoint gestart en wordt de dimensie van de padlijsten opgehoogd.
Opmerking: Dit betekent dat als alle stuuropdrachten in de wachtrij zijn voltooid, er automatisch met een ander waypoint voor de gestopte status wordt gestart. Dit is vergelijkbaar met de beginpositie waarop de RV stationair is en de tijd bijhoudt.
Maximumaantal routepunten: 80
RV positie en pad
| • | Mogelijkheid om de X, Y-coördinaat, koers, tijd en afstand voor elke stuuropdracht die in uitvoering is te lezen. |
| • | Bewaart de geschiedenis van de paden in lijsten om te plotten en te analyseren |
Opmerking: De gebruiker kan een schaal voor het coördinatenrooster instellen, de standaard is 10cm per eenheid. De gebruiker heeft mogelijkheden om de oorsprong van het rooster in te stellen.
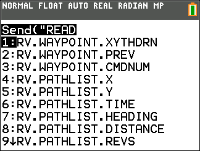
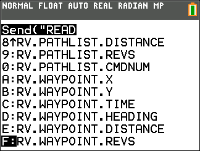
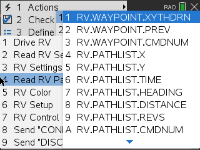
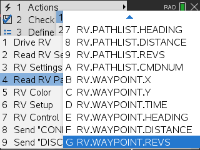
Opdrachten voor Lees RV pad…
|
|
CE Rekenmachines
|
TI‑Nspire™ CX
|
![]()