先决条件:先使用 Send "Connect RV" 命令
使用 Rover 时,需先使用“CONNECT RV”命令。“CONNECT RV”命令可对 TI-Innovator™ Hub 软件进行配置,使其与 TI-Innovator™ Rover 进行协作。
使用该命令可以连接到 Rover 上的各种设备(两台电机、两个编码器、一个陀螺仪、一个 RGB LED 和一个颜色传感器)。还可以清除各种计数器和传感器值。可选“MOTORS”参数仅可对电机进行配置,并且可以在没有附加周边设备的情况下对电机实现直接控制。
CONNECT RV—初始化硬件连接。
| • | 连接 RV 以及内置于 RV 中的输入和输出。 |
| • | 重置路径和网格起点。 |
| • | 将每米单位设置为默认值 10。默认网格单位 = 10 厘米。 |
RV 命名子系统
RV 实体包含若干可直接根据名称寻址的子系统。这些子系统包括车轮以及让 Rover 感应世界的传感器。
下表按名称列出了这些子系统。
|
子系统名称 |
子系统说明 |
|---|---|
|
RV |
RV 对象为一个整体。 |
|
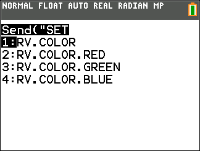
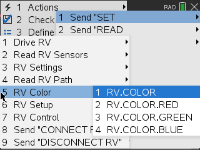
RV.COLOR |
Rover 顶面上的三色 RGB LED 可以通过用户程序进行控制,以显示任意颜色组合。 |
|
RV.COLORINPUT |
颜色传感器位于Rover底部,用于检测表面的颜色。 |
|
RV.RANGER |
前置超声波测距传感器。以米为单位返回测量值。~10.00 米表示未检测到任何障碍物。 |
|
RV.ENCODERGYRO |
旋转编码器(每个电机一个)测量Rover行进的距离。 附带陀螺仪和操作时间信息的左右编码器。 |
|
RV.GYRO |
陀螺仪用于在运动时保持Rover的行进方向。它也可用于测量转向期间角度的变化。 |
|
RV.MOTOR.L |
用于直接控制(高级)的左车轮电机和控制。 |
|
RV.MOTOR.R |
用于直接控制(高级)的右车轮电机和控制。 |
|
RV.MOTORS |
左右电机均作为用于直接控制(高级)的单一对象受到管理。 |
Rover 命令类别
Rover命令分为两类:
| 1. | 排队执行:所有Rover移动命令(前进、后退、向左、向右、角度)在TI-Innovator Hub上排队。它们可能会在将来某一时间执行。 |
| 2. | 立即执行:其他命令(如读取传感器或设置Rover上的RGB LED)将立即执行。 |
这意味着程序中的某些语句将在程序中更靠前的语句之前执行,尤其是如果后者是排队执行系列的一部分时。
例如,在以下程序中,在Rover停止移动前,RGB LED会变为红色:
Send "SET RV.COLOR 255 0 255" —立即执行的命令
Send "RV FORWARD 5" —队列中的命令
Send "RV LEFT 45" —队列中的命令
Send "RV RIGHT 90" —队列中的命令
Send "SET RV.COLOR 255 0 0" —立即执行的命令
示例:
若要在“FORWARD”运动后更改颜色,请使用带“WAIT”的“TIME”参数。
Send "RV FORWARD TIME 5"
WAIT 5
Send "SET RV.COLOR 255 0 255"
RV 命令、代码样本和语法
以下示例演示了各种 RV 命令的用法。在任何情况下使用 SET 命令,都可以暂停 SET(选用)。
代码样本
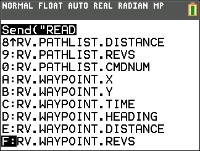
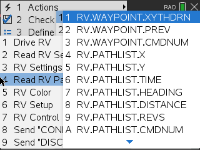
当您在命令表中看到“Code Sample(代码样本)”时,可以将此“Code Sample(代码样本)”原样复制并粘贴,以发送到您的图形计算器,以便在您的计算中使用。
示例:
|
代码 |
Send ("RV FORWARD 5") Send ("RV FORWARD SPEED 0.2 M/S TIME 10")
|
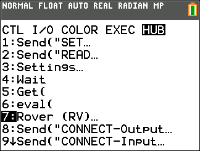
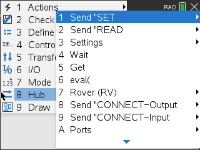
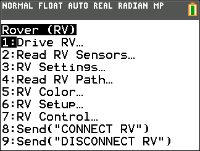
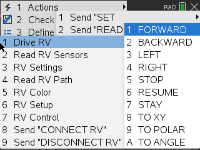
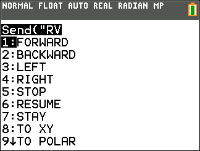
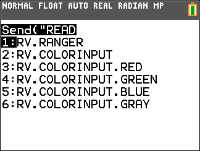
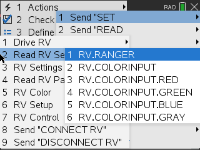
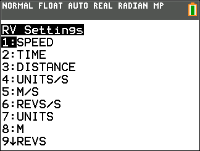
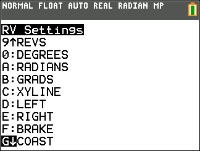
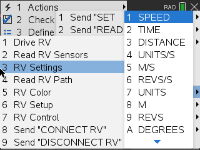
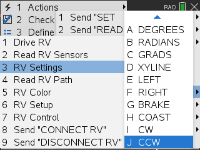
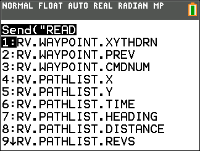
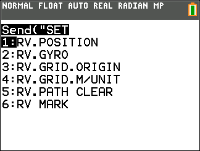
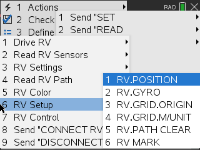
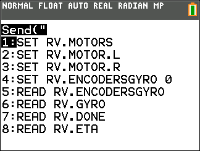
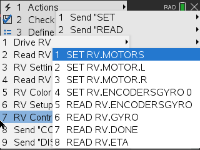
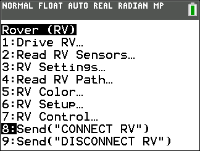
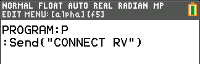
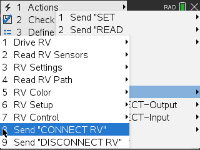
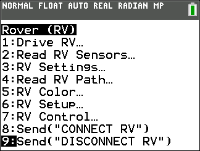
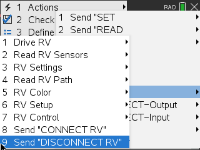
TI-Innovator™ Rover 菜单 |
|||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
|||||||||||||||||||||||||||||
Rover (RV) ... |
CE 计算器
|
TI‑Nspire™ CX
|
|||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()
|
CE 计算器
|
TI‑Nspire™ CX
|

![]()