读取路径点和路径
跟踪 RV 的路径
为支持在运行期间和之后对 Rover 进行分析,Sketch 将自动权衡每个驱动命令的以下信息:
| • | 虚拟网格上的 X 坐标 |
| • | 虚拟网格上的 Y 坐标 |
| • | 当前命令的已执行时间(单位:秒)。 |
| • | 路径段的坐标单位距离。 |
| • | 航向(单位:度)(在 X 轴为 0 度时逆时针测量到的绝对项) |
| • | 车轮执行当前命令过程中的转数 |
| • | 命令编号,用于跟踪执行的命令编号,以 0 开头。 |
路径值将存储在列表中,起始于与最早的命令相关联的区段,终止于与最新的命令相关联的区段。
Rover 向最后一个路径点前进时,进行中的驱动命令 WAYPOINT 将重复更新路径列表中的最新元素。
完成驱动命令时将启动新的路径点,路径列表的维度将增加。
注:这意味着,完成队列中的所有驱动命令时将会自动启动处于停止状态的另一个路径点。这与 RV 处于静止和计时状态时的初始位置类似。
路径点的最大数量:80
RV 的位置和路径
| • | 能够读取执行中的每个驱动命令的 X/Y 坐标、航向、时间和距离。 |
| • | 将路径历史记录存储在测绘和分析列表中 |
注:坐标网格比例尺可由用户进行设置,默认为每单位 10 厘米。该用户可选择设置网格起点。
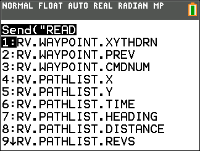
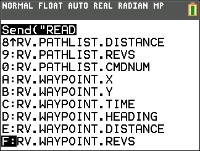
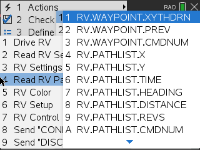
Read RV Path ... 命令
|
|
CE 计算器
|
TI‑Nspire™ CX
|
![]()