TI-Innovator™ Rover kommandon version 1.5
Förberedelser: Skicka kommandot ”Connect RV” först
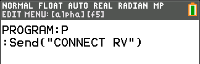
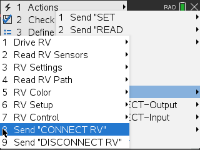
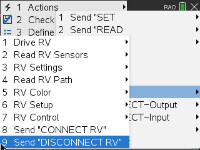
Kommandot ”CONNECT RV” måste användas först vid användning av Rover. Kommandot ”CONNECT RV” konfigurerar programvaran till TI-Innovator™ Hub för att fungera med TI-Innovator™ Rover.
Anslutningar etableras till de olika Rover-komponenterna: två motorer, två avkodare, ett gyroskop, en RGB LED och en färgsensor. Kommandot nollställer också de olika räkneverken och sensorvärdena. Parametern ”MOTORS” konfigurerar endast motorerna och tillåter direkt styrning av dem utan annan kringutrustning.
CONNECT RV – initierar hårdvaruanslutningarna.
|
•
|
Ansluter RV och dess inbyggda ingångar och utgångar. |
|
•
|
Återställer Path och koordinatsystemets nollpunkt. |
|
•
|
Ställer in enheter per meter till det förvalda värdet 10. Förvald koordinatenhet = 10 cm. |
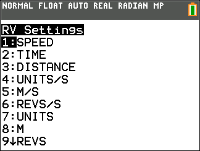
Nämnda RV-undersystem
RV-objektet innehåller flera undersystem som adresseras direkt med sina namn. Undersystemen är hjulen och sensorer för orientering av Rover.
Undersystemen är listade efter namn i följande tabell.
|
RV
|
RV-objektet som helhet.
|
|
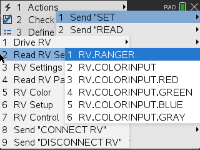
RV.COLOR
|
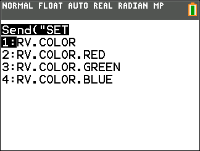
Den trefärgade lysdioden RGB LED på ovansidan av Rover kan styras med hjälp av användarprogram och visa valfri färgkombination.
|
|
RV.COLORINPUT
|
Färgsensorn sitter längst ned på Rover och används för att avgöra ytans färg.
|
|
RV.RANGER
|
Den framåtriktade avståndsmätaren för ultraljud. Svarar med mått i meter. ~10,00 meter betyder att inga hinder har upptäckts.
|
|
RV.ENCODERGYRO
|
Roterande avkodare (en för varje motor) mäter den sträcka Rover färdas.
Vänster och höger avkodare kopplade till gyroskopet och körtidsinformation.
|
|
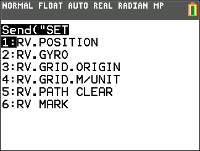
RV.GYRO
|
Gyroskopet används för att hålla en fast riktning medan Rover rör sig. Det kan även användas för att mäta förändringar av vinklar under vändningar.
|
|
RV.MOTOR.L
|
Vänster hjulmotor och användning av direkt styrning (avancerad).
|
|
RV.MOTOR.R
|
Höger hjulmotor och användning av direkt styrning (avancerad).
|
|
RV.MOTORS
|
Både vänster och höger motor hanteras som ett objekt för användning av direkt styrning (avancerad).
|
Kategorier av Rover-kommandon
Rover-kommandon faller inom två kategorier:
|
1.
|
Köad exekvering: Alla rörelsekommandon för Rover (FRAMÅT, BAKÅT, VÄNSTER, HÖGER, VINKEL) köas på TI-Innovator Hub. De kan exekveras vid en senare tidpunkt. |
|
2.
|
Omedelbar exekvering: Andra kommandon, som de som läser av sensorerna eller ställer in RGB-lysdioderna på Rover, exekveras omedelbart. |
Det innebär att vissa programsatser i programmet exekveras före satser som förekommer tidigare i programmet, särskilt om de senare kommandona ingår i en köad familj.
I programmet nedan kommer t.ex. RGB-lysdioden att lysa RÖTT innan Rover slutar röra sig:
Send "SET RV.COLOR 255 0 255" – direktexekverade
Send "RV FORWARD 5" – kommando i kö
Send "RV LEFT 45" – kommando i kö
Send "RV RIGHT 90" – kommando i kö
Send "SET RV.COLOR 255 0 0" – direktexekverade
Exempel:
Använd ”TIME”-parametern med ”WAIT” för att ändra färg efter en ”FORWARD”-förflyttning.
Send "RV FORWARD TIME 5"
WAIT 5
Send "SET RV.COLOR 255 0 255"
RV-kommandon, kodexempel och syntax
Med följande exempel visas hur olika RV-kommandon används. När ett SET-kommando används kan SET utelämnas (alternativ användning).
Kodexempel
När du ser "Kodsampel" i en kommandotabell kan "Kodsampel" kopieras och klistras in i befintligt skick och skickas till grafräknaren för att användas i dina beräkningar.
Exempel:
|
Koda
Sampel:
|
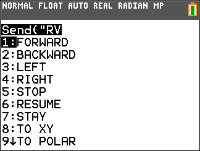
Send ("RV FORWARD 5")
Send ("RV FORWARD SPEED 0.2 M/S TIME 10")
|
|
|
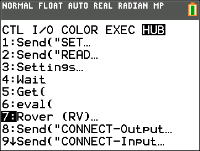
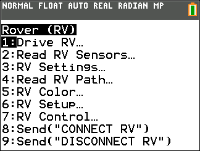
Rover (RV)...
|
CE Räknare
|
TI-Nspire™ CX

|
|
|
|
|
|

|
|
CE Räknare
|
TI-Nspire™ CX
|
|
|
CE Räknare

|
TI-Nspire™ CX
|
|
|
CE Räknare
|
TI-Nspire™ CX

|
|
|
CE Räknare
|
TI-Nspire™ CX

|
|
|
CE Räknare

|
TI-Nspire™ CX

|