Comandos del TI-Innovator™ Rover versión 1.4
Prerrequisitos: Utilice primero el comando Send "Connect RV"
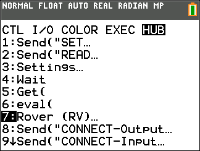
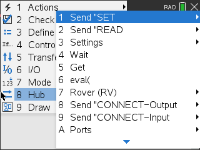
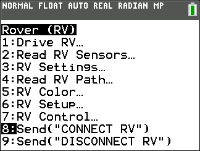
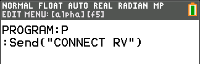
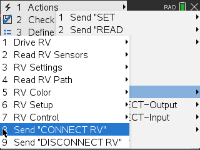
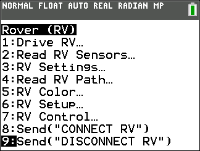
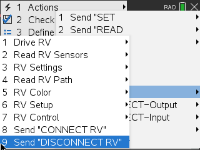
El comando "CONNECT RV" debe utilizarse primero cuando se utilice el Rover. El comando "CONNECT RV" configura el software del TI-Innovator™ Hub para que funcione con el TI-Innovator™ Rover.
Establece las conexiones de varios dispositivos en el Rover: dos motores, dos codificadores, un giroscopio, una luz LED RGB y un sensor de colores. También borra varios contadores y valores de sensor. El parámetro opcional “MOTORS” configura solo los motores y permite el control directo de los mismos sin periféricos adicionales.
CONNECT RV: inicia las conexiones de hardware.
|
•
|
Conecta el RV, así como las entradas y salidas integradas en el RV. |
|
•
|
Restablece la trayectoria y el origen de la cuadrícula. |
|
•
|
Establece al valor predeterminado de 10 para las unidades por metro. Unidad de cuadrícula predeterminada = 10 cm. |
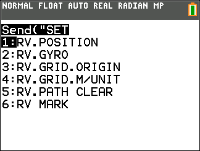
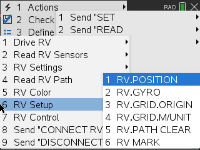
Subsistemas indicados del RV
El objeto RV contiene varios subsistemas que se indican directamente mediante el nombre. Estos subsistemas consisten en las ruedas y los sensores que permiten que el Rover detecte el mundo.
Los subsistemas aparecen por nombre en la siguiente tabla.
|
RV
|
El objeto RV completo.
|
|
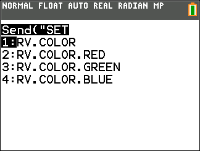
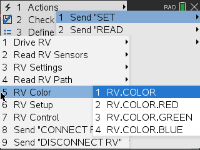
RV.COLOR
|
La luz LED RGB tricolor en la superficie superior del Rover puede controlarse por medio de programas de usuario para mostrar cualquier combinación de colores.
|
|
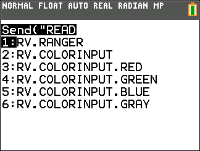
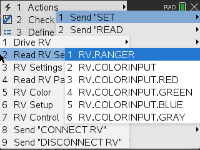
RV.COLORINPUT
|
El sensor de colores está en la parte inferior del Rover y se utiliza para detectar el color en la superficie.
|
|
RV.RANGER
|
El sensor ultrasónico de distancia frontal. Muestra las medidas en metros. ~10.00 metros significa que no se detectaron obstáculos.
|
|
RV.ENCODERGYRO
|
Los codificadores rotatorios (uno en cada motor) miden la distancia del trayecto del Rover.
El codificador izquierdo y derecho, junto con el giroscopio y la información del tiempo de operación.
|
|
RV.GYRO
|
El giroscopio se utiliza para mantener la dirección en el Rover mientras está en movimiento. También puede utilizarse para cambiar el ángulo durante giros.
|
|
RV.MOTOR.L
|
Motor de la rueda izquierda y control para uso de control directo (avanzado).
|
|
RV.MOTOR.R
|
Motor de la rueda derecha y control para uso de control directo (avanzado).
|
|
RV.MOTORS
|
Los motores IZQUIERDO y DERECHO se manejan como un solo objeto para el uso del control directo (avanzado).
|
Categorías de comandos de Rover
Los comandos del Rover se dividen en dos categorías:
|
1.
|
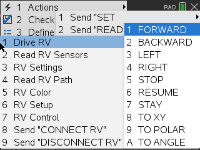
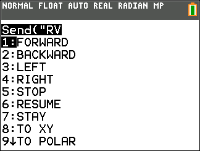
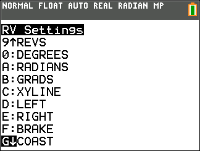
Ejecución en fila: Todos los comandos de movimiento del Rover (FORWARD, BACKWARD, LEFT, RIGHT, ANGLE) están en fila en el TI-Innovator Hub. Se pueden ejecutar en el futuro. |
|
2.
|
Ejecución inmediata: Otros comandos (como los de lectura de sensores o el establecimiento de la luz LED RGB en el Rover) se ejecutan inmediatamente. |
Esto significa que ciertos enunciados en su programa se ejecutarán antes que los enunciados que aparecen antes en el programa, especialmente si los últimos comandos son parte de la familia en la fila.
Por ejemplo, en el programa a continuación, la luz LED RGB se volverá ROJA antes de que el Rover detenga el movimiento:
Send "SET RV.COLOR 255 0 255" ; se ejecuta inmediatamente
Send "RV FORWARD 5" ; comando en cola
Send "RV LEFT 45" ; comando en cola
Send "RV RIGHT 90" ; comando en cola
Send "SET RV.COLOR 255 0 0" ; se ejecuta inmediatamente
Ejemplo:
Para cambiar el color después de un movimiento "FORWARD", utilice el parámetro "TIME" con "WAIT".
Send "RV FORWARD TIME 5"
WAIT 5
Send "SET RV.COLOR 255 0 255"
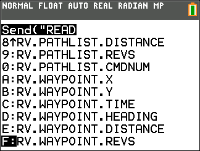
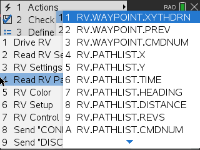
Comandos del RV, muestras de código y sintaxis
Los siguientes ejemplos muestran cómo se utilizan varios comandos del RV. Siempre que se utilice un comando SET, el SET puede dejarse desactivado (uso opcional).
Muestras de programación
Cuando vea “Muestra de programación” en una tabla de comandos, esta “Muestra de programación” puede pegarse y copiarse tal cual para enviarla a su calculadora gráfica y utilizarse en sus cálculos.
Ejemplo:
|
Muestra de
programación:
|
Send ("RV FORWARD 5")
Send ("RV FORWARD SPEED 0.2 M/S TIME 10")
|
|
|
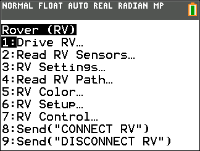
Rover (RV)…
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
|
|
|

|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras
|
TI‑Nspire™ CX
|
|
|
CE Calculadoras

|
TI‑Nspire™ CX
|