CE Calculadoras
TI‑Nspire™ CX
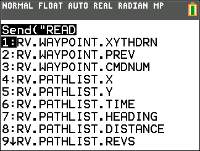
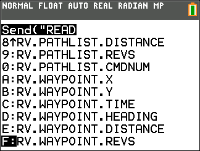
Para ayudar en el análisis del Rover durante una ejecución y después de la misma, el diagrama medirá automáticamente la siguiente información de cada comando de conducción:
| • | Coordenada X en la cuadrícula virtual |
| • | Coordenada Y en la cuadrícula virtual |
| • | Tiempo que se ha ejecutado el comando actual, en segundos. |
| • | Distancia para el segmento de la trayectoria, en unidades de coordenada. |
| • | Rumbo en grados (términos absolutos medidos) en el sentido contrario al de las manecillas del reloj con el eje X en 0 grados. |
| • | Revoluciones de la rueda en la ejecución del comando actual |
| • | Número de comandos, lleva un conteo del número de comandos ejecutados, comienza en 0. |
Los valores de la trayectoria se almacenan en listas, comenzando con los segmentos asociados con los comandos anteriores y yendo a los segmentos asociados con los últimos comandos.
El comando de conducción en progreso, el WAYPOINT, actualizará de manera repetida el último elemento en las listas de trayectorias conforme el Rover avance hacia el último punto de paso.
Cuando se completa el comando de conducción, se inicia un punto de paso nuevo y se incrementan las listas de trayectorias.
Nota: Esto significa que cuando todos los comandos de conducción en la cola se hayan ejecutado, se iniciará automáticamente otro punto de paso para el estado de paro. Esto es parecido a la posición inicial en donde el RV está estacionado y se cuenta el tiempo.
Número máximo de puntos de paso: 80
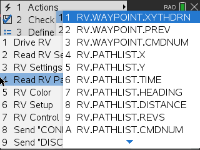
| • | Capacidad de leer la coordenada X,Y, rumbo, tiempo y distancia de cada comando de conducción en ejecución. |
| • | Almacenará el historial de trayectorias en listas para gráficas y análisis |
Nota: El usuario puede establecer la escala de la cuadrícula de coordenadas, el valor predeterminado es de 10 cm por unidad. El usuario tendrá opciones para establecer el origen de la cuadrícula.
|
CE Calculadoras
|
TI‑Nspire™ CX
|
![]()