TI-Innovator™ Rover-Befehle Version 1.5
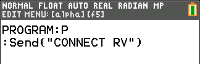
Voraussetzung: Verwenden Sie zuerst den Befehl „Connect RV“
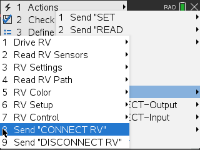
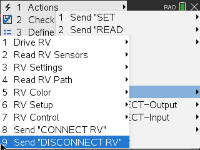
Der Befehl „CONNECT RV“ muss zuerst verwendet werden, wenn der Rover verwendet wird. Der Befehl „CONNECT RV“ konfiguriert die TI-Innovator™ Hub Software, damit sie mit dem TI-Innovator™ Rover funktioniert.
Er baut die Verbindungen zu den verschiedenen Geräten am Rover auf – zwei Motoren, zwei Geber, ein Gyroskop, eine RGB LED und ein Farbsensor. Außerdem bereinigt er die verschiedenen Zähler und Sensorwerte. Der optionale Parameter „MOTORS“ konfiguriert nur die Motoren und ermöglicht die Direktsteuerung der Motoren ohne die zusätzlichen Peripheriegeräte.
CONNECT RV - initialisiert die Hardware-Verbindungen.
|
•
|
Verbindet RV und Ein- und Ausgänge, die in den RV integriert sind. |
|
•
|
Setzt Pfad und Rasterursprung zurück. |
|
•
|
Setzt die Einheiten pro Meter auf den Standardwert 10. Standard-Rastereinheit = 10 cm. |
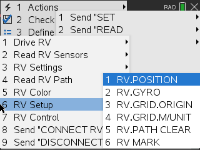
Benannte RV- Subsysteme
Das RV-Objekt enthält mehrere Subsysteme, die direkt nach dem Namen adressiert werden. Diese Subsysteme bestehen aus den Rädern und den Sensoren, anhand derer der Rover die Welt ertastet.
Die Subsysteme sind in der folgenden Tabelle nach Name aufgeführt.
|
RV
|
Das RV-Objekt als Ganzes.
|
|
RV.COLOR
|
Die dreifarbige RGB LED auf der Oberseite des Rover kann durch Anwenderprogramme gesteuert werden, um beliebige Farbkombinationen anzuzeigen.
|
|
RV.COLORINPUT
|
Der Farbsensor befindet sich auf der Unterseite des Rover und wird verwendet, um die Farbe der Oberfläche zu erfassen.
|
|
RV.RANGER
|
Der nach vorne zeigende Ultraschall-Abstandssensor. Gibt Messungen in Metern zurück. ~ 10,00 Meter bedeutet, dass kein Hindernis erkannt wurde.
|
|
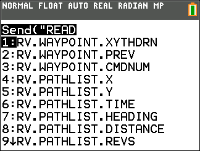
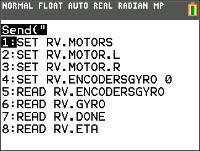
RV.ENCODERGYRO
|
Die Drehgeber – einer auf jedem Motor – messen die vom Rover zurückgelegte Strecke.
Der linke und rechte Geber, gekoppelt mit der Gyroskop- und Betriebszeit-Information.
|
|
RV.GYRO
|
Das Gyroskop wird verwendet, um den Kurs des Rover zu halten, während dieser in Bewegung ist. Es kann auch verwendet werden, um die Änderung des Winkels in Kurven zu messen.
|
|
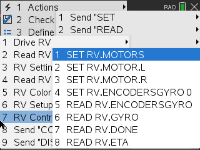
RV.MOTOR.L
|
Motor des linken Rads und Steuerung für Direktsteuerungsverwendung (erweitert).
|
|
RV.MOTOR.R
|
Motor des rechten Rads und Steuerung für Direktsteuerungsverwendung (erweitert).
|
|
RV.MOTORS
|
LEFT (LINKER) und RIGHT (RECHTER) Motor, als einzelnes Objekt für Direktsteuerungsverwendung (erweitert) behandelt.
|
Rover-Befehlskategorien
Die Rover-Befehle fallen in zwei Kategorien:
|
1.
|
Ausführung nach Warteschlange: Alle Bewegungsbefehle des Rovers – FORWARD, BACKWARD, LEFT, RIGHT, ANGLE – befinden sich in der Warteschlange des TI-Innovator Hub. Sie können zu einem späteren Zeitpunkt ausgeführt werden. |
|
2.
|
Sofortige Ausführung: Andere Befehle, die beispielsweise Sensoren auslesen oder die RGB-LED auf dem Rover einstellen, werden sofort ausgeführt. |
Dies bedeutet, dass bestimmte Anweisungen vor Anweisungen, die früher im Programm erscheinen, in Ihrem Programm ausgeführt werden, vor allem, wenn die letzteren Befehle zu den Befehlen gehören, die in der Warteschlange ausgeführt werden.
Beispielsweise wird im nachfolgenden Programm die RGB-LED rot leuchten, bevor der Rover stoppt:
Send "SET RV.COLOR 255 0 255" – sofort ausgeführt
Send "RV FORWARD 5" – in der Warteschlange platzierter Befehl
Send "RV LEFT 45" – in der Warteschlange platzierter Befehl
Send "RV RIGHT 90" – in der Warteschlange platzierter Befehl
Send "SET RV.COLOR 255 0 0" – sofort ausgeführt
Beispiel:
Verwenden Sie zum Ändern der Farbe nach einer „FORWARD“-Bewegung den „TIME“-Parameter mit „WAIT“.
Send "RV FORWARD TIME 5"
WAIT 5
Send "SET RV.COLOR 255 0 255"
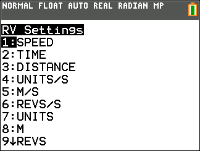
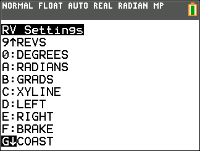
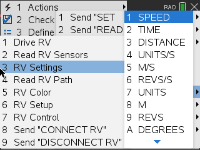
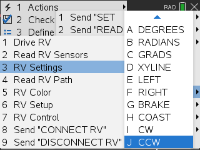
RV-Befehle, Code-Muster und Syntax
In den folgenden Beispielen wird gezeigt, wie die verschiedenen Befehle für den RV verwendet werden. Immer, wenn ein SET-Befehl verwendet wird, kann SET deaktiviert gelassen werden (optionale Verwendung).
Code Samples
Wenn Sie ein „Code-Beispiel“ in einer Befehlstabelle sehen, kann dieses „Code-Beispiel“ kopiert und so wie es ist an Ihren Graphikrechner gesendet und in Ihren Berechnungen verwendet werden.
Beispiel:
|
Code-
Beispiel:
|
Send ("RV FORWARD 5")
Send ("RV FORWARD SPEED 0.2 M/S TIME 10")
|
|
|
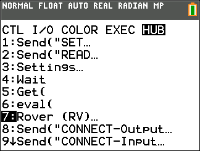
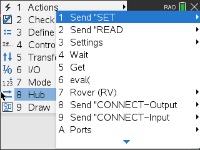
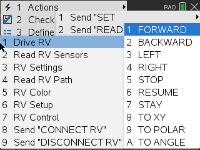
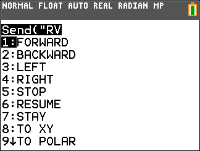
Rover (RV)...
|
CE Taschenrechner
|
TI‑Nspire™ CX
|
|
|
|

|
|

|
|
CE Taschenrechner
|
TI‑Nspire™ CX
|
|
|
CE Taschenrechner

|
TI‑Nspire™ CX

|
|
|
CE Taschenrechner
|
TI‑Nspire™ CX
|
|
|
CE Taschenrechner
|
TI‑Nspire™ CX
|
|
|
CE Taschenrechner

|
TI‑Nspire™ CX

|
|
|
CE Taschenrechner
|
TI‑Nspire™ CX
|
|
|
CE Taschenrechner
|
TI‑Nspire™ CX
|
|
|
CE Taschenrechner

|
TI‑Nspire™ CX
|
|
|
CE Taschenrechner


|
TI‑Nspire™ CX
|