CE Calculators
TI‑Nspire™ CX
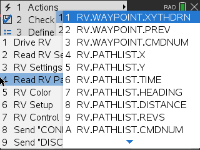
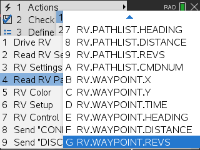
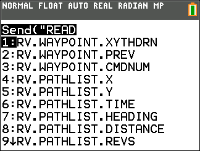
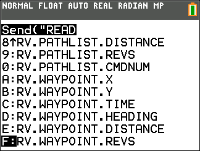
In order to support analysis of the Rover during and after a run, the sketch will automatically measure the following information for each Drive command:
| • | X Coordinate on virtual grid |
| • | Y Coordinate on virtual grid |
| • | Time in seconds that the current command has been executing. |
| • | Distance in coordinate units for the path segment. |
| • | Heading in degrees (absolute terms measured Counter Clockwise with the X-axis as 0 degrees. |
| • | Revolutions by the wheel in executing the current command |
| • | Command number, tracks the number of commands executed, begins with 0. |
The Path values will be stored in lists, starting with the segments associated with the earliest commands and going to the segments associated with the latest commands.
The drive command in progress, the WAYPOINT, will repeatedly update the last element in the Path lists as the Rover progresses toward the last waypoint.
When a drive command is completed a new waypoint is initiated and the dimension of the Path lists are incremented.
Note: This implies that when all the drive commands in the queue are completed that another waypoint for the stopped state is automatically started. This is similar to the initial position where the RV is stationary and counting time.
Max number of waypoints: 80
| • | Ability to read X,Y coordinate, Heading, Time and Distance for each drive command in execution. |
| • | Will store path history in lists for plotting and analysis |
Note: Coordinate grid scale can be set by the user, default is 10cm per unit. The user will have options to set the origin of the grid.
|
CE Calculators
|
TI‑Nspire™ CX
|
See Also:
| - | RV.ETA |
| - | RV.DONE |
![]()