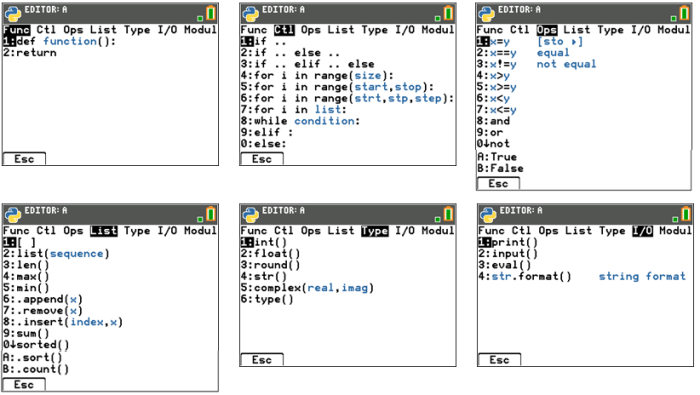
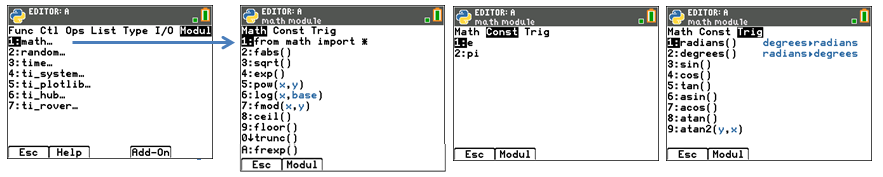
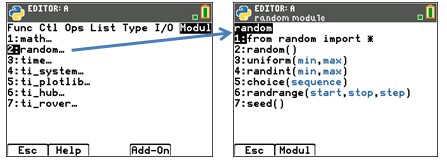
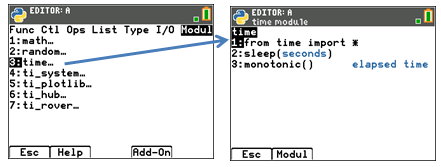
Die Verknüpfungs-Registerkarte [Fns...] zeigt Menüs mit häufig verwendeten Python-Funktionen, Schlüsselwörtern und Operatoren an. Die Menüs bieten auch Zugang zu den ausgewählten Funktionen und Konstanten aus den Modulen und Add-on-Modulen. Anstatt dass Sie Zeichen für Zeichen über die Tastatur eingeben, bieten diese Menüs eine schnelle Möglichkeit zum Einfügen in Editor oder Shell. Drücken Sie [Fns…], wenn Sie sich im Editor oder in der Shell befinden. Alternative Eingabemethoden finden Sie auch unter Verwenden des Python-Katalogs und Verwenden der Python-Tastatur.
Wenn Sie eine Python-Funktion oder -Konstante aus einem Modul verwenden, verwenden Sie immer eine Import-Anweisung, um den Ort der Funktion, Methode oder Konstante im Modul anzugeben.
Siehe Was ist die Python-Programmierumgebung?
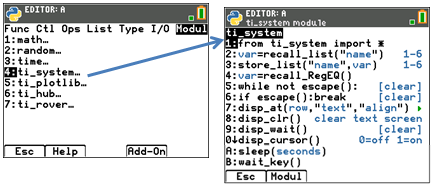
Siehe: Tastaturbelegung für wait_key()

Wichtiger Hinweis für die grafische Darstellung:
| • | Um die erwarteten Ergebnisse zu gewährleisten, muss die Reihenfolge der Programmzeilen für das Plotting der Reihenfolge im Setup-Menü folgen. |
| • | Die grafische Anzeige wird angezeigt, wenn plt.show_plot() am Ende der Plotting-Objekte in einem Programm ausgeführt wird. Um den Plotting-Bereich in der Shell zu löschen, drücken Sie [clear]. Verwenden Sie die Tasten [2nd] } und [2nd] †, um das Shell-Protokoll einzusehen. |
| • | Die Ausführung eines zweiten Programms, das davon ausgeht, dass die Standardwerte innerhalb derselben Shell-Umgebung festgelegt sind, führt im Allgemeinen zu unerwartetem Verhalten, beispielsweise bei den Farb- oder anderen Standardargument-Einstellungen. Bearbeiten Sie Programme mit erwarteten Argumentwerten oder reinitialisieren Sie die Shell, bevor Sie ein anderes Plotting-Programm ausführen. |
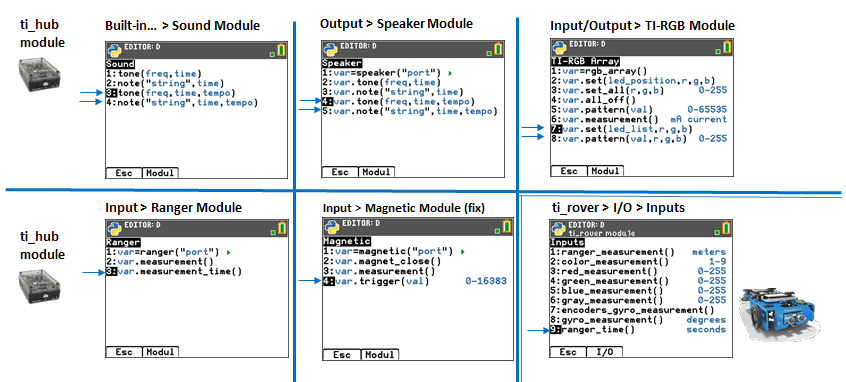
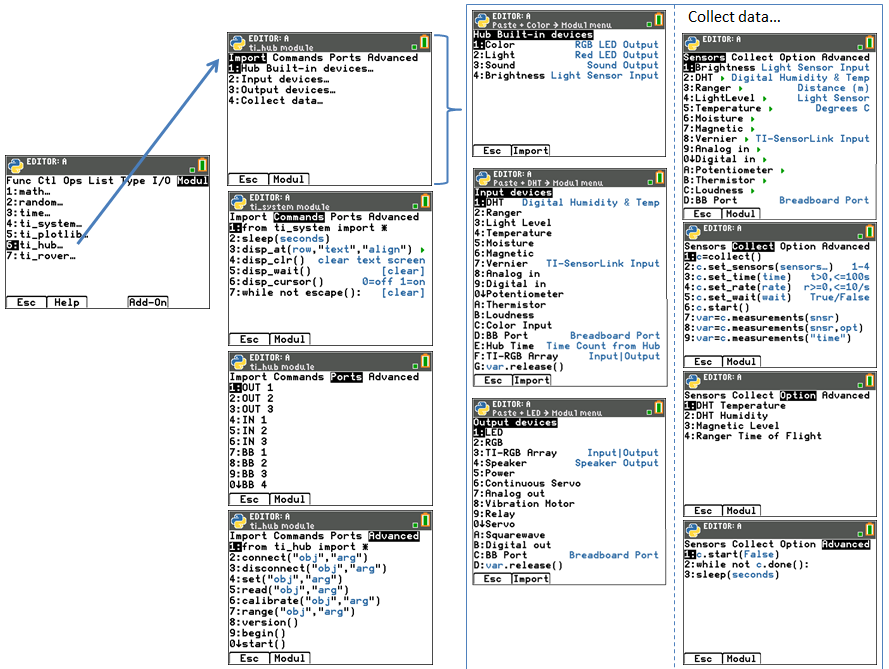
ti_hub-Methoden sind nicht im Katalog und somit auch nicht im Referenz-Leitfaden aufgeführt. Bitte benutzen Sie für Argumente und Argumentvorgaben oder Details zu erlaubten Werten die Bildschirminformationen in den Menüs. Weitere Informationen zur Python-Programmierung für
TI-Innovator™ Hub und TI-Innovator™ Rover stehen unter education.ti.com zur Verfügung.
Hinweis: TI-Innovator™ Hub sollte angeschlossen sein, wenn Sie Ihre Python-Programme ausführen.
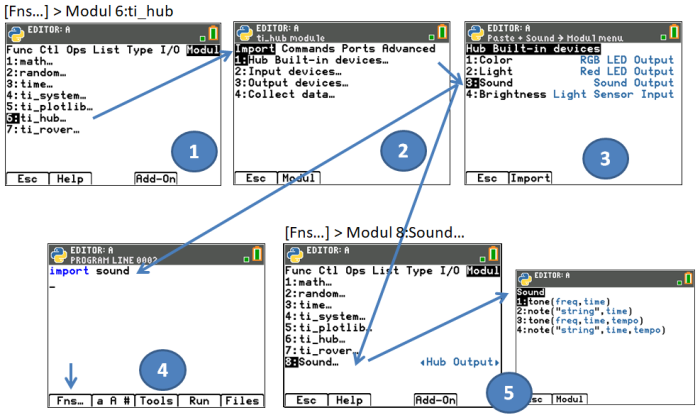
Beispiel: Ton importieren
Gehen Sie wie folgt vor, um TI-Innovator™ Sensormethoden aus dem Editor in Ihr Python-Programm zu importieren:
| 1. | Wählen Sie [Fns…] > Modul 6:ti_hub |
| 2. | Wählen Sie das ti_hub-Importmenü. Wählen Sie einen Sensortyp aus Built-in, Input und Output. |
| 3. | Wählen Sie einen Sensor. |
| 4. | Eine Import-Anweisung wird in den Editor eingefügt und das Sensormodul steht in [Fns...] > Modul zur Verfügung, wenn Sie von Ihrem Programm zu diesem Menü zurückkehren. |
| 5. | Wählen Sie [Fns…] > Modul 8:Sound..., um geeignete Methoden für diesen Sensor einzufügen. |
Hinweis: „Brightns“ ist ein „integriertes“ Objekt in TI-Innovator Hub.
Wenn Sie die Anweisung „import brightns“ verwenden, geben Sie „brightns.range(0,100)“ ein, um sicherzustellen, dass zu Beginn der Programmausführung der korrekten Standardbereich eingestellt ist.
Beispiel:
import brightns
brightns.range(0,100)
b=brightns.measurement()
print(b)
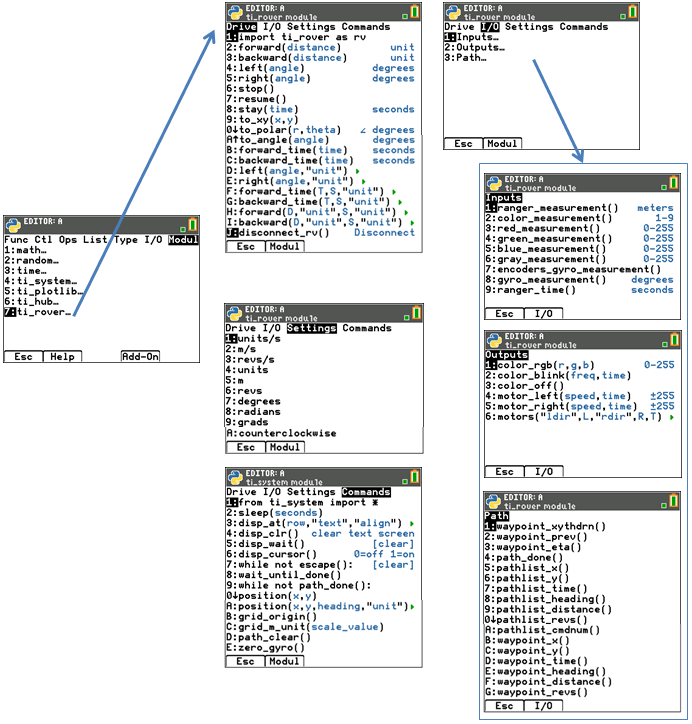
ti_rover-Methoden sind nicht im Katalog und somit auch nicht im Referenz-Leitfaden aufgeführt. Bitte benutzen Sie für Argumente und Argumentvorgaben oder Details zu erlaubten Werten die Bildschirminformationen in den Menüs. Weitere Informationen zur Python-Programmierung für
TI-Innovator™ Hub und TI-Innovator™ Rover stehen unter education.ti.com zur Verfügung.
Hinweise:
| • | In der TI-Python-Programmierung müssen Sie keine Methoden zum Verbinden und Trennen von TI-Innovator™ Rover einschließen. Die TI-Innovator™ Rover-Python-Methoden schließen das Verbinden und Trennen ohne zusätzliche Methoden ein. Dies ist ein kleiner Unterschied zur Programmierung des TI-Innovator™ Rovers in TI-Basic. |
| • | rv.stop() wird als Pause ausgeführt, anschließend werden die Rover-Bewegungen in der Warteschlange über „resume“ fortgeführt. Wenn nach rv.stop() ein weiterer Bewegungsbefehl ausgeführt wird, wird die Bewegungswarteschlange geleert. Auch dies ist ein kleiner Unterschied zur Programmierung des TI-Innovator™ Rovers in TI-Basic. |