Verwijzing naar onderaanzicht
| • | Stel de |
| • | Demonteer de batterij niet en gebruik de batterij niet verkeerd. |
| • | Koppel meerdere |
| • | Gebruik uitsluitend de USB-kabels die meegeleverd zijn met de |
| • | Gebruik uitsluitend de door TI geleverde voedingen: |
| - | TI Wall Charger inbegrepen bij de TI‑Innovator™ Hub |
| - | Optioneel External Battery Pack |
| - | 4AA batterijhouder inbegrepen in de TI‑Innovator™ Breadboard Pack |
| • | Zorg dat de onderdelen spanning ontvangen van de |
| • | Vermijd het gebruik van de |
| • | Steek de geleidedraden van LED's en andere onderdelen niet rechtstreeks in de |
| • | Sluit de ontvangende pin van 5V op de |
| • | Het aansluiten van de bovenste rij ontvangende pinnen (BB1-10) op de onderste rij (pinnen voor aarde en spanning) wordt niet aanbevolen. |
| • | Geen pin op de |
| • | Sluit de positieve en negatieve geleidedraden van een spanningsbron niet aan op de zelfde groep van 5 pinnen het breadboard. Dit kan schade aan het breadboard en de spanningsbron veroorzaken. |
| • | Let op de juiste polariteit: |
| - | Wanneer het breadboard aangesloten wordt op de |
| - | Wanneer onderdelen aangesloten worden die gevoelig zijn voor polariteit, zoals LED-lampjes en de TTL-stroom MOSFET. |
| • | Gebruik voor elke module de juiste aansluiting voor input en output. |
| - | Vibratiemotor – ondersteund op OUT 1, OUT 2, en OUT 3. |
| - | Servomotor – gebruik alleen OUT 3. |
| - | Witte LED – ondersteund op OUT 1, OUT 2, en OUT 3. |
| - | Analoge lichtsensor – ondersteund op IN 1, In 2, en IN 3. |
| - | Ultrasoon ranger – ondersteund op IN 1, IN 2. |
| • | Gebruik een externe hulpvoeding voor modules waarvoor meer dan 50 mA nodig is, waaronder: |
| - | Vibratiemotor |
| - | Servomotor |
| • | Houd de as van de servomotor tijdens het draaien niet vast. Draai de servomotor ook niet handmatig. |
| • | Witte LED: |
| - | Verbuig de geleidepinnen niet herhaaldelijk; hierdoor verzwakken de draden en kunnen ze breken. |
| - | De LED moet met de juiste polariteit worden aangesloten. Lees voor meer informatie de instructies voor het monteren van de LED in de TI‑Innovator™ Technology eGuide (hier). |
| - | De LED moet met de juiste polariteit worden aangesloten. Lees voor meer informatie de instructies voor het monteren van de LED (hier). |
| • | Geen I/O-module kan invoer geven ontvangen van meer dan 4 mA. |
| • | Stel de |
| • | Demonteer de batterij niet en gebruik de batterij niet verkeerd. |
| • | Plaats geen dingen zwaarder dan 1 kg of 2.2 lbs op |
| • | Gebruik uitsluitend de USB-kabels die meegeleverd zijn met de |
| • | Gebruik uitsluitend de lintkabels die meegeleverd zijn met de |
| • | Gebruik alleen de door TI meegeleverde wandoplader die bijgesloten is bij de |
| • | De aan de voorzijde gemonteerde |
| • | Voor de beste resultaten verwijdert u het schuifdeksel van uw grafische rekenmachine. |
| • | Voor de beste resultaten gebruikt u de |
| • | Voor de beste resultaten gebruikt u de |
| • | Draai de houderpinnen op het rekenmachineplatform niet zonder ze eerst omhoog te trekken. Dan zouden ze kunnen afbreken. |
| • | Gebruik de merkstift niet als hefboom om de Rover |
| • | Schroef de behuizing aan de onderzijde van de Rover |
| • | Verplaats Rover niet na het uitvoeren van een programma. De interne gyroscope kan onbedoeld proberen de Rover terug te krijgen op het spoor met behulp van de eerste locatie. |
| • | Wanneer u de breadboard-lintkabel in de |
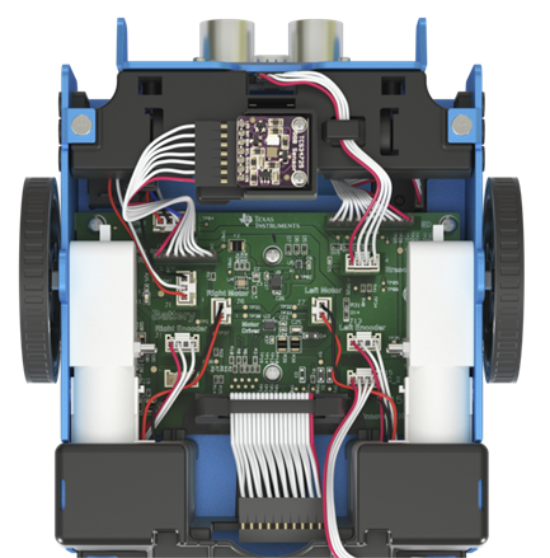
Let op: Indien u de kabels los maakt of loskoppelt, gebruik dan deze afbeelding als referentie voor de juiste aansluitingen.
|
Verwijzing naar onderaanzicht |
|---|
|
|
![]()