Reference to Bottom View
| • | Setzen Sie die |
| • | ( ) nicht auseinanderbauen oder misshandeln. |
| • | Verketten Sie nicht mehrere |
| • | Verwenden Sie nur USB-Kabel, die mit dem ( ) bereitgestellt werden |
| • | Verwenden Sie nur von TI bereitgestellte Mittel der Stromversorgung: |
| - | TI Wall Charger enthalten im TI‑Innovator™ Hub |
| - | Optional External Battery Pack |
| - | 4-AA Batteriehalter enthalten im TI‑Innovator™ Breadboard Pack |
| • | Vergewissern Sie sich, dass die Komponenten, die vom ( ) Strom erhalten, |
| • | Vermeiden Sie den Gebrauch von |
| • | Fügen Sie die Leitungen von LEDs und sonstige Komponenten nicht direkt in den |
| • | Verbinden Sie den Pin mit 5 V auf dem |
| • | Es wird nicht empfohlen, die oberste Reihe von Pins (BB1-10) mit der untersten Reihe (GND und Stromanschlüssen) zu verbinden. |
| • | Kein Pin auf dem |
| • | Verbinden Sie nicht die positiven und negativen Leitungen einer Stromquelle mit derselben Gruppe von 5 Pins auf dem Breadboard. Damit könnten Sie das Breadboard und die Stromquelle beschädigen. |
| • | Beachten Sie die korrekte Polarität: |
| - | Beim Anschluss des Breadboards an den |
| - | Beim Anschluss von Komponenten, die empfindlich auf Polarität reagieren, wie etwa LEDs und TTL Leistung MOSFET. |
| • | Verwenden Sie den passenden Eingangs- oder Ausgangsport, wie er für das jeweilige Modul erforderlich ist. |
| - | Vibrationsmotor – unterstützt auf OUT 1, OUT 2 und OUT 3. |
| - | Servomotor – verwenden Sie nur OUT 3. |
| - | Weiße LED – unterstützt auf OUT 1, OUT 2 und OUT 3. |
| - | Analoger Lichtsensor – unterstützt auf IN 1, In 2 und IN 3. |
| - | Ultraschall-Ranger – unterstützt auf IN 1, IN 2. |
| • | Verwenden Sie eine zusätzliche Stromversorgung für Module, die mehr als 50 mA benötigen, einschließlich: |
| - | Vibrationsmotor |
| - | Servomotor |
| • | Halten Sie nicht die Achse des Servomotors fest, während sie sich dreht. Drehen Sie auch den Servomotor nicht per Hand. |
| • | Weiße LED: |
| - | Biegen Sie die Leitungen nicht wiederholt; dies schwächt die Drähte und kann dazu führen, dass sie brechen. |
| - | Die LED erfordert die korrekte Polarität, wenn sie in ihre Buchse eingesteckt wird. Einzelheiten entnehmen Sie bitte den Anweisungen zum Zusammenbau der LED in der TI‑Innovator™ Technology eGuide (hier). |
| - | Die LED erfordert die korrekte Polarität, wenn sie in ihre Buchse eingesteckt wird. Einzelheiten entnehmen Sie bitte den Anweisungen zum Zusammenbau der LED (hier). |
| • | Kein I/O-Modul kann mehr als 4 mA aufnehmen oder abgeben. |
| • | Setzen Sie die |
| • | Bauen Sie den |
| • | Stellen Sie nichts mit einem Gewicht von über 1 kg auf die |
| • | Verwenden Sie nur USB-Kabel, die mit dem |
| • | Verwenden Sie nur Bandkabel, die mit dem |
| • | Verwenden Sie nur das von TI bereitgestellte Ladegerät, das im |
| • | Der an der Vorderseite angebrachte |
| • | Um die besten Ergebnisse zu erzielen, verwenden Sie Ihren Grafikrechner ohne das Schiebeetui. |
| • | Um die beste Leistung zu erzielen, verwenden Sie den |
| • | Um die beste Leistung zu erzielen, verwenden Sie den |
| • | Drehen Sie die Halteklammern an der Rechnerplattform erst, nachdem Sie sie zunächst angehoben haben. Anderenfalls könnten sie brechen. |
| • | Verwenden Sie den Marker nicht als Hebel, um den |
| • | Schrauben Sie nicht die Verkleidung unten am |
| • | Bewegen Sie Rover nicht, nachdem Sie ein Programm ausgeführt haben. Das interne Gyroskop kann unbeabsichtigt versuchen, den Rover mithilfe des ursprünglichen Standorts wieder auf Kurs zu bringen. |
| • | Wenn Sie das Breadboard-Bandkabel in den |
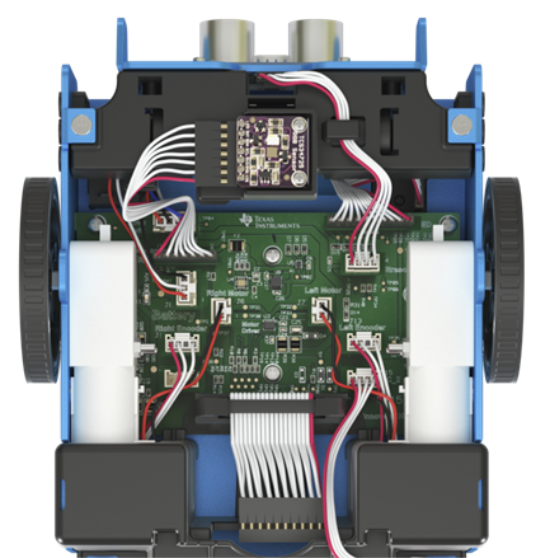
Vorsicht: Wenn Sie eines der Kabel lösen oder entfernen, verwenden Sie dieses Bild als Referenz für korrekte Anschlüsse.
|
Reference to Bottom View |
|---|
|
|