深入了解组装有 TI-Innovator™ Hub 和 TI CE 图形计算器或连接有 TI-Nspire™ CX 手持设备的 TI-Innovator™ Rover 的各个方面。
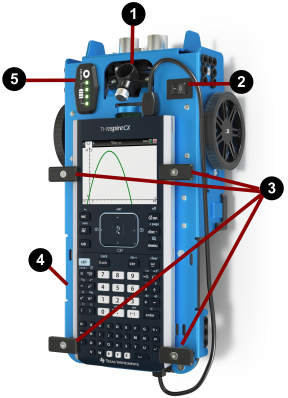
 记号笔固定器 - 放置描画路径的记号笔。
记号笔固定器 - 放置描画路径的记号笔。
 打开/关闭 (I/O) 开关 - 将 Rover 打开 (–)或关闭 (O)。
打开/关闭 (I/O) 开关 - 将 Rover 打开 (–)或关闭 (O)。
 计算器固定器桩钉 - 将图形计算器安全地固定在计算器平台上。
计算器固定器桩钉 - 将图形计算器安全地固定在计算器平台上。
 计算器平台 - 放置 TI CE 图形计算器或
计算器平台 - 放置 TI CE 图形计算器或
TI-Nspire™ CX 手持设备相连。
 LED 面板(RGB LED/电池电量指示灯) - 通过红绿蓝 (RGB) LED 显示可编程的反馈,以及显示电池电量。
LED 面板(RGB LED/电池电量指示灯) - 通过红绿蓝 (RGB) LED 显示可编程的反馈,以及显示电池电量。
 颜色传感器 - 安装在底部的颜色传感器,可检测表面的颜色。也可以检测黑色 (0) 到白色 (255) 的灰度级别。
颜色传感器 - 安装在底部的颜色传感器,可检测表面的颜色。也可以检测黑色 (0) 到白色 (255) 的灰度级别。
陀螺仪 - 测量或维持方向。
I2C 扩展端口。
球型脚轮 - 在坚硬的表面上实现平稳的移动。
注:不建议在地毯上使用。
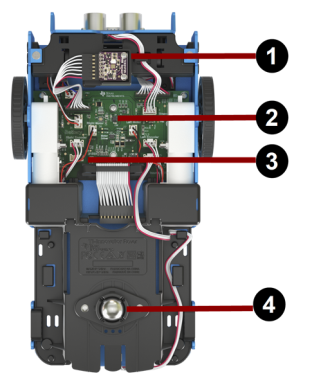
注意:如果拆卸或断开了任何线缆,请参考此图像进行正确连接。
超声波测距仪 - 测量与障碍物的距离。

导轨 - 使 Hub 可轻松滑入 Rover 并连接到 Rover 电路板。

注:插入 TI-Innovator™ Hub 后,可以访问传感器和两个端口。
| • | 灯光亮度传感器 - 在 Hub 命令字符串中写作“BRIGHTNESS”。 |
| • | I2C 端口 - 使用 I 2 C 线缆将 Hub 连接到 Rover 电路板。 |
| • | DATA Mini‑B 端口 - 使用 USB 单位到单位(Mini‑A 到 Mini‑B)线缆将 Hub 连接到图形计算器。 |
Rover 上的接入口:
| • | PWR 端口 - 使用 USB 标准 A 转微型辅助电源线为 Rover 充电电池充电。 |
| • | 正面和背面座架 - 用于使用连锁塑料块向 Rover 添加结构。 |

注:插入 Hub 后,可访问用于控制输出模块的三个端口。
| • | OUT 1 和 OUT 2 提供 3.3V 电源。 |
| • | OUT 3 提供 5V 电源。 |
Rover 上的接入口:
| • | 正面和背面座架 - 用于使用连锁塑料块向 Rover 添加结构。 |

注:插入 Hub 后,可访问用于从输入模块收集数据或状态的三个端口。
| • | IN 1 和 IN 2 提供 3.3V 电源。 |
| • | IN 3 提供 5V 电源。 |
![]()