B”端口(位于
B”端口(位于 此部分说明您可能会遇到的一些问题并就如何解决这些问题给出建议。
如果您需要更多帮助,请联系 TI-Cares。
| - | 确保计算器打开。 |
| - | 如果您使用 USB 设备到设备(迷你 A 转迷你 B)线缆连接到计算器,请确保将线缆的“B”端连接到“DATA B”端口(位于 |
| - | 确保计算器的操作系统为最新版本。 |
| - | 确保连接到计算器的 USB 线缆一端完全插入。 |
| - | 从 TI-Innovator™ |
| - | 确保您使用的是最新版本的 TI-Nspire™ CX 软件。最新版本安装的驱动程序可让计算机识别 TI-Innovator™ |
| - | 确保使用 TI-Innovator™ 端口上的“DATA B”端口连接到 TI-Innovator™ Hub |
| - | 从 TI-Innovator™ |
| - | 如果您不使用TI-Innovator™ |
| - | 关闭主机计算器或计算机。 |
– 或 –
| - | 断开 USB 线缆。 |
如果错误 LED 闪烁且扬声器发出声音,则表示发送到 TI-Innovator™
TI-Innovator™
![]()
| - | 下载并运行测试程序来测试您的板载组件。 |
| - | 确保程序使用的值与板载组件支持的范围一致 |
| - | RGB:强度级别范围为 0 到 255 |
| - | 扬声器:范围为 40 到 4000 Hz |
板载 COLOR/RGB 命令和 SOUND/SPEAKER 命令不能同时使用。用户程序应等待 SOUND/SPEAKER 命令完成之后,再向 TI-Innovator™
LED 光源以高速在闪烁。人眼无法察觉这种闪烁,但光线亮度传感器却会记录这种闪烁并报告它正在读取的值。
![]()
| - | 检查以确保已充电 |
| - | 确保它已打开。 |
| - | 确保连接所有线缆。 |
| - | 确保试验板线缆配置正确(红线位置正确) |
| - | 确保所有试验板针脚都是直的。 |
| - | 确保您有最新版本的sketch |
| - | 确保您有最新版本的操作系统 |
| - | 尝试测试程序 |
| - | 除计算器外,Rover之上不要放其他任何东西。 |
| - | 如果使用笔架,请确保笔没有插入过深导致它将Rover顶起。 |
| - | 清洁脚轮 |
| - | 在光滑平坦的表面上使用,以获得最佳效果 |
| - | 检查以确认方向是否符合您的程序的预期结果。 |
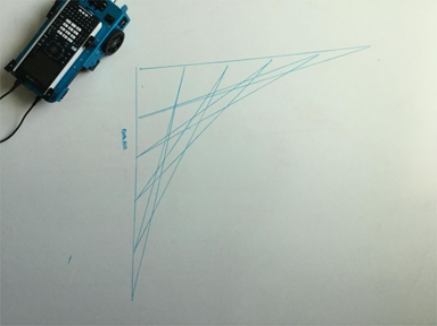
| - | Rover不是精密绘图工具。您应该预计到特定图形会有一定程度的不精确。 |
| - | 转向时,Rover 可能会有 +/- 0.5 度的差异。分段(或转向)次数越多,差异就会越严重。 |
| - | 使用Rover的最佳表面是平坦光滑的表面(而不是地毯或瓷砖) |
使用 Rover 绘制图形(或函数)的方法有两种。
它们的精度水平不同,即便绘制的大体图形相同(如八边形),绘制结果也可能不同。
方法 1:使用 FORWARD/BACKWARD/LEFT/RIGHT—这些命令会让 Rover 按指定的距离和角度移动。角运动可能不精确,取决于表面以及记号笔是否存在。
方法 2:使用“TO XY”、“TO POLAR”—这些命令会让 Rover 更精确地转向,移动至特定坐标。即使使用这些命令,多次分段后也会累加小错误。使用大尺寸网格和/或多于 18 条线段的函数和图形的绘制结果可能会与预期图形不匹配。
与 Rover 转向相关的命令有两种
| - | RV LEFT/RV RIGHT 命令:这些命令会让 Rover 相对于当前位置转动特定的角度。 |
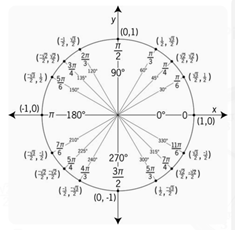
| - | RV TO ANGLE—此命令会让 Rover 移动至单位圆上的指定角度 |
RV LEFT 30
RV LEFT 45
将使 Rover 处于 75 度角
RV TO ANGLE 30
RV TO ANGLE 45
将使 Rover 处于 45 度角
确保您的程序使用的转向命令与您期望的 Rover 运动相符。
即使计算器设置单位为弧度,这些命令也会将角度作为默认单位。
您可以通过“Hub -> Rover (RV) -> RV Settings”菜单,在命令中指定 Rover 的转向单位为 RADIANS 或 GRADS(百分度)
Rover 使用的默认单位为 10 厘米(约 4 英寸)。
因此,命令 RV FORWARD 1 会使 Rover 前进 10 厘米
相当于“RV FORWARD 1 UNITS”和“RV FORWARD 0.1 M”命令
要让 Rover 移动特定距离,您可以通过“M”设置指定米数。
记号笔架能支撑常见的细记号笔或干擦记号笔。记号笔架在设计上借助重力来固定记号笔的位置。即便记号笔的尾端出现一定运动,笔尖仍将保持在适当位置。
Rover 的默认位置在笛卡尔网格点的原点,位于正 x 轴下方。
初始朝向是:位置 (0,0);航向 0 度(东—指向正 x 轴)。
TO XY 让 Rover 首先转向适当的角度,再直行到目标点。
TO XY 1 1 首先向左转向 45 度,然后移动 sqrt(2) 个单位(单位:10 厘米,即移动 14.14 厘米)。
另见 Rover>Setup>SET RV.POSITION
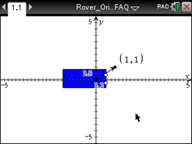
Table 1: 例 1:
|
|
|
Rover命令分为两类:
| 1. | 排队执行:所有Rover移动命令(前进、后退、向左、向右、角度)在TI-Innovator Hub上排队。它们可能会在将来某一时间执行。 |
| 2. | 立即执行:其他命令(如读取传感器或设置Rover上的RGB LED)将立即执行。 |
这意味着程序中的某些语句将在程序中更靠前的语句之前执行,尤其是如果后者是排队执行系列的一部分时。
例如,在以下程序中,在Rover停止移动前,RGB LED会变为红色:
Send "SET RV.COLOR 255 0 255" – immediately executed
Send "RV FORWARD 5" – queued command
Send "RV LEFT 45" – queued command
Send "RV RIGHT 90" – queued command
Send "SET RV.COLOR 255 0 0" – immediately executed
如果命令排队等待稍后执行,则可能会发生这种情况。计算器显示“Done(完成)”,是因为程序已经完成,并将所有命令发送到TI-Innovator Hub。即使计算器程序完成,Hub仍将执行命令来控制Rover。
虽然通常情况下会立即显示电池充电状态信息,但也可能需要等待一分钟才能显示电池状态信息。
为Rover充电几分钟,等待显示电池状态信息。
要完全禁用Rover,请将电源开关切换到“OFF(关闭)”位置并断开USB 线缆与图形计算器的连接。
如果两个电机没有经过相似的内部校准,则可能会发生这种情况。我们意识到这个问题,并通过更新Hub sketch来得出解决方案。
确保使用选项卡的正确方向。选项卡有“CE”和“CX”刻印,分别适合TI84Plus CE系列和TI-Nspire CX系列计算器。
参考测试程序。
检查连接是否松动。
请参考下面的接线图以供参考。

| - | 检查脚轮处有无碎片 |
| - | 使用压缩空气进行清理。 |
| - | 轮胎可能已经脱落。检查以确保它们完全安装在脚轮上。 |
| - | 建议使用光滑平坦的表面。 |
| - | 如何检查以确保它们完全安装在脚轮上。 |
在连接到Hub之前,请重新对准原始配置中的针脚。
这些命令将在Hub sketch的未来版本中执行。
| - | 演示:编程以一显身手。进行测试操作。 |
| - | 测试程序:每次测试一个组件。确保它们工作。 |
![]()
以下故障诊断步骤可以帮助确定白色 LED I/O 模块是否发生故障。
| - | 确保 LED 正确插入插座。 |
| - | 将 LED 插入插座 - 较长引脚(引线)为正极(阳极)。如果两根引线长度相等,则与 LED 外壳上平整边缘相邻的为负极(阴极)引线。 |
| - | 下载并运行测试程序来测试您的白色 LED 模块组件。 |
| - | 确保已将 I/O 模块连接到程序要求的正确端口 |
以下故障诊断步骤可以帮助确定模拟光线传感器 I/O 模块是否发生故障。
| - | 下载并运行测试程序来测试您的模拟光线传感器 I/O 模块组件。 |
| - | 确保已将 I/O 模块连接到程序要求的正确端口 |
以下故障诊断步骤可以帮助确定振动电机 I/O 模块是否发生故障。
| - | 下载并运行测试程序来测试您的振动电机 I/O 模块组件。 |
| - | 确保已将 I/O 模块连接到程序要求的正确端口。 |
以下故障诊断步骤可以帮助确定伺服电机 I/O 模块是否发生故障。
| - | 下载并运行测试程序来测试您的伺服电机 I/O 模块组件。 |
| - | 确保已将 I/O 模块连接到 OUT3,并且您正在使用的程序正在调用 OUT3。 |
| - | 伺服电机要求 TI-Innovator™ Hub 具有外部电源。Hub 上的 PWR 连接器让您能够连接辅助电源。您可以使用 TI 壁挂式充电器或外部电池。如果TI-Innovator™ |
| - | 如果超时,可能需要重新校准伺服电机。重新校准的步骤: |
| - | 将外部电源连接到 TI-Innovator |
| - | 将伺服电机连接到 OUT3 |
| - | 发送命令“CONNECT SERVO 1 TO OUT3” |
| - | 发送命令“SET SERVO 1 CW 0 TIME 100”(将速度设置为零,如果需要可以增加时间值) |
| - | 如果伺服电机不移动,则它已经被校准,如果伺服电机正在移动,请使用螺丝刀移动电机背面的电位计直到其停止。 |
以下故障诊断步骤可以帮助确定超声波测距仪 I/O 模块是否发生故障。
| - | 下载并运行测试程序来测试您的超声波测距仪 I/O 模块组件。 |
| - | 确保已将 I/O 模块连接到程序要求的正确端口。 |
TI-Innovator™
![]()
| • | TI-SensorLink 不是数据采集解决方案。USB 连接式探头或实验室底座依然是纯数据采集和分析的最佳解决方案。 |
| • | 目前,针对带 Vernier 模拟传感器的 TI-SensorLink 的 Hub 命令不是 Hub 应用(CE 系列)或 Hub 菜单(TI-Nspire™ CX)的组成部分。 |
| • | 需要键入或从现有程序复制新的命令和关键字。请注意,关键字中的任何排字错误都会导致 sketch 中显示错误。 |
![]()
| - | 如果从外部源或文本编辑器粘贴代码,则可能在需要直引号("...")的地方包含“弯”引号(“...”)。您可能需要更换一些或全部弯引号。 |
| - | TI CE 图形计算器和 TI-Nspire™ CX 技术之间的语法规则略有不同。可能需要对最初为一个平台创建的代码进行修改,才能用于另一个平台。 |
| - | 在 TI CE 图形计算器上,确保您的代码行末尾没有空格字符。要找出某行中的这些结尾空白,可以将光标移到该行并按 [2nd],然后按右箭头键。代码中的相邻空格也会导致语法错误。 |
| - | TI CE 图形计算器:按 ON 键。 |
| - | TI-Nspire™ CX 手持设备:按住 Home/ON 键并反复按 Enter 键。 |
| - | Windows®:按住 F12 键并反复按 Enter 键。 |
| - | Mac®:按住 F5 键并反复按 Enter 键。 |
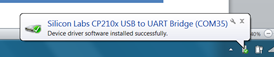
确保您使用的是最新版本的 TI-SmartView CE 软件,即 5.2 版本。该版本安装“
The TI-Innovator™
如果命令结构出现错误,并且 sketch 无法处理命令,则错误 LED 将闪烁。检查板载、I/O 模块和试验板组件的样本命令,以了解如何修改程序。
![]()
| - | 针对 sketch 更新,请确保您使用的是 USB 标准 A 转微型线缆,而不是 USB 标准 A 转迷你 B 线缆。将线缆的微型端连接到 Hub 顶部的 PWR 连接器。 |
| - | 这可能是线缆问题。一些 USB 线缆仅用于电源,而非数据。 |
| - | 确保您使用的是 TI-Innovator™ |
Yes.
![]()
| - | 按“接通/断开”按钮以确保电池已接通。如果 3 分钟后仍未连接到 TI-Innovator™ |
| - | 确保外部电池已充电。按“接通/断开”按钮。如果 LED 灯不亮,则需要对外部电池进行充电。 |
![]()