B’ aan de onderkant van de
B’ aan de onderkant van de Dit hoofdstuk beschrijft enkele problemen die u kunt tegenkomen en geeft suggesties om het probleem op te lossen.
Als u meer assistentie nodig heeft, neemt u contact op met TI-Cares.
TI-Innovator™ Hub Problemen oplossen
Problemen met ingebouwde onderdelen oplossen
Problemen met TI-Innovator™ Rover oplossen
Problemen met I/O-module oplossen
Probleemoplossen voor TI-SensorLink
Problemen oplossen bij het programmeren met TI-Basic
| - | Zorg dat de rekenmachine is aangezet. |
| - | Als u gebruikmaakt van een USB-rekenmachine-naar-rekenmachine-kabel (mini-A naar mini-B) om een rekenmachine aan te sluiten, moet u ervoor zorgen dat u het ‘B’-uiteinde van de kabel aansluit op de poort ‘DATA B’ aan de onderkant van de |
| - | Controleer of uw rekenmachine over de meest recente versie van het besturingssysteem beschikt. |
| - | Zorg ervoor dat het uiteinde van de USB-kabel dat op de rekenmachine is aangesloten, stevig aangesloten is. |
| - | Maak de USB-kabel los van de TI-Innovator™ |
| - | Zorg ervoor dat u gebruikmaakt van de meest recente versie van de TI-Nspire™ CX-software. De meest recente versie installeert een stuurprogramma dat de computer in staat stelt de TI-Innovator™ |
| - | Zorg ervoor dat u de TI-Innovator™ Hub aansluit via de poort "DATA B" op de poort van de TI-Innovator™ |
| - | Maak de USB-kabel los van de TI-Innovator™ |
| - | Als u geen gebruikmaakt van de USB-kabel die wordt meegeleverd met de TI-Innovator™ |
| - | Zet de hoofdrekenmachine of -computer uit. |
– OF –
| - | Koppel de USB-kabel los. |
Als de fout-LED knippert en de luidspreker een toon afgeeft, bevatten de opdrachten die naar de TI-Innovator™
De TI-Innovator™
![]()
| - | Download het testprogramma en voer het uit om uw ingebouwde onderdeel te testen. |
| - | Zorg ervoor dat uw programma waarden gebruikt die passen bij het bereik dat door elk ingebouwd onderdeel wordt ondersteund |
| - | RGB: Bereik van 0 tot 255 voor intensiteitsniveau |
| - | Luidspreker: Bereik van 40 tot 4000 Hz |
De ingebouwde KLEUR/RGB-opdrachten en GELUID/LUIDSPREKER-opdrachten kunnen niet tegelijkertijd worden gebruikt. Gebruikersprogramma's moeten wachten totdat de GELUID/LUIDSPREKER-opdracht is voltooid voordat een KLEUR/RGB-opdracht wordt verzonden naar de TI-Innovator™
LED-lichtbronnen flikkeren op hoge snelheid. Hoewel het menselijke oog deze flikkering niet kan waarnemen, registreert de helderheidssensor deze flikkering wel en meldt de waarden die worden gemeten.
![]()
| - | Controleer of deze is opgeladen |
| - | Controleer of deze is ingeschakeld. |
| - | Controleer of alle kabels zijn aangesloten. |
| - | Controleer of de configuratie van de breadboard-kabel juist is (rode draad aan correcte zijde) |
| - | Controleer of de breadboard-pennen recht zijn. |
| - | Controleer of u over de meest recente sketch beschikt |
| - | Controleer of u over het meest recente besturingssysteem beschikt |
| - | Probeer het testprogramma |
| - | Zorg ervoor dat er behalve de rekenmachine niets boven op de Rover staat. |
| - | Als u gebruikmaakt van de markeerstifthouder, controleert u of de pen niet zo ver in de houder hebt geschoven dat de Rover wordt opgetild. |
| - | Reinig de zwenkwieltjes |
| - | Gebruik op een egale, vlakke ondergrond voor de beste resultaten |
| - | Controleer of de oriëntatie overeenkomt met de verwachtingen van uw programma. |
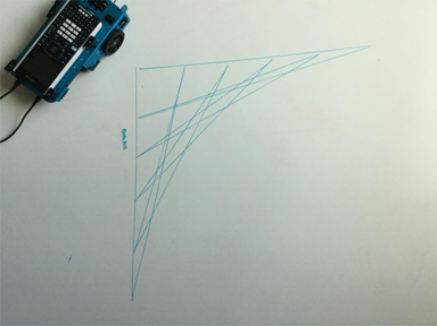
| - | De Rover is geen precisie-instrument voor het tekenen. Bij specifieke vormen kunt u een zekere mate van onnauwkeurigheid verwachten. |
| - | Tijdens het draaien kan Rover een afwijking van +/- 0,5 graden hebben. Hoe groter het aantal lijnstukken (of draaiingen) hoe meer die afwijking kan oplopen. |
| - | De beste oppervlakken voor het gebruiken van de Rover zijn egale, vlakke ondergronden (geen tapijt of tegels) |
Er zijn twee methoden om vormen (of functies) met Rover te tekenen.
Ze hebben verschillende niveaus van nauwkeurigheid en kunnen verschillende resultaten opleveren, zelfs voor dezelfde algemene vorm (bijv. een achthoek).
Methode 1 Met behulp van FORWARD/BACKWARD/LEFT/RIGHT (VOORUIT/ACHTERUIT/LINKS/RECHTS) - deze opdrachten verplaatsen Rover met de opgegeven afstand en hoek. De hoekbeweging is mogelijk niet precies en hangt zowel van het oppervlak als van de aanwezigheid van de merkstift af.
Methode 2: Met behulp van 'TO XY', 'TO POLAR' - deze opdrachten verplaatsen Rover naar specifieke coördinaten met nauwkeurigere draaiingen. Zelfs met deze opdrachten tellen kleine fouten op na meerdere lijnstukken. Functies en vormen die een grote rastergrootte en/of meer dan 18 lijnstukken gebruiken, kunnen resulteren in een tekening die niet overeenkomt met de verwachte vorm.
Er zijn twee verschillende opdrachten die te maken hebben met het draaien van Rover
| - | Opdrachten RV LEFT/RV RIGHT: Deze opdrachten vertellen Rover om over de gespecificeerde hoek ten opzichte van de huidige positie van Rover te draaien. |
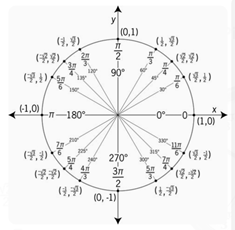
| - | RV TO ANGLE - Deze opdracht verplaatst ROVER naar de specifieke hoek op de eenheidscirkel |
RV LEFT 30
RV LEFT 45
Zal resulteren in Rover in een hoek van 75 graden
RV TO ANGLE 30
RV TO ANGLE 45
Zal resulteren in Rover in een hoek van 45 graden
Zorg ervoor dat uw programma de draaiopdracht gebruikt die overeenkomt met uw verwachtingen over de beweging van Rover.
Deze opdrachten gebruiken graden als de standaardeenheid, zelfs als de instelling op de rekenmachine in radialen is.
U kunt RADIALEN of GON (gradiënten) specificeren in de opdracht voor draaiingen van Rover via het menu "Hub -> Rover (RV) -> RV Settings"
Rover gebruikt een standaardeenheid van 10 cm (~ 4 inch).
Dus de opdracht - RV FORWARD 1 - zorgt ervoor dat Rover 10 cm vooruit beweegt
Dit is hetzelfde als de opdrachten "RV FORWARD 1 UNITS" en "RV FORWARD 0,1 M"
Als u Rover over specifieke afstanden wilt verplaatsen, kunt u de instelling 'M' gebruiken om meters op te geven.
De houder voor de markeerstift ondersteunt gewone dunne markeerstiften of droog uitwisbare markeerstiften. De houder is ontworpen om de zwaartekracht het werk te laten doen om de markeerstift op zijn plaats te houden. De punt van de markeerstift blijft op de juiste plaats staan, ook als er enige beweging is aan het andere uiteinde van de markeerstift.
De standaardpositie van Rover is in de oorsprong van een rechthoekig assenstelsel langs de positieve x-as.
De oorspronkelijke oriëntatie is: positie (0,0); richting 0 graden (oost - wijzend naar de positieve x-as).
TO XY draait eerst naar de juiste hoek en gaat dan recht naar het punt.
TO XY 1 1 draai 45 graden naar links en verplaats dan sqrt (2) (wortel 2) eenheden (@ 10 cm/eenheid = 14,14 cm).
Zie ook Rover > Setup > SET RV.POSITION
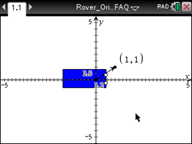
Table 1: Voorbeeld 1:
|
|
|
De opdrachten van de Rover vallen in twee categorieën:
| 1. | Uitvoering vanuit wachtrij: Alle bewegingsopdrachten van de Rover, zoals VOORUIT, ACHTERUIT, LINKS, RECHTS, HOEK, worden in de wachtrij geplaats op de TI-Innovator Hub. Zij worden mogelijk op een later moment uitgevoerd. |
| 2. | Directe uitvoering: Andere opdrachten, zoals de opdrachten voor het uitlezen van de sensoren of het instellen van de RGB-LED op de Rover, worden onmiddellijk uitgevoerd. |
Dit betekent dat bepaalde instructies in uw programma worden uitgevoerd vóór instructies die eerder in het programma voorkomen, met name als de laatstgenoemde opdrachten deel uitmaken van de serie opdrachten die vanuit de wachtrij worden uitgevoerd.
In het onderstaande programma, wordt bijvoorbeeld, de RGB-LED ROOD voordat de Rover stopt met bewegen:
Send "SET RV.COLOR 255 0 255" – immediately executed
Send "RV FORWARD 5" – queued command
Send "RV LEFT 45" – queued command
Send "RV RIGHT 90" – queued command
Send "SET RV.COLOR 255 0 0" – immediately executed
Dit kan gebeuren als de opdrachten in de wachtrij zijn geplaatst om later te worden uitgevoerd. De rekenmachine geeft ‘Gereed’ aan omdat de programma’s gereed zijn met het verzenden van alle opdrachten naar de TI-Innovator Hub. De Hub voert de opdrachten voor het besturen van de Rover uit hoewel het programma van de rekenmachine is voltooid.
Hoewel de oplaadstatus van de batterij gewoonlijk meteen wordt weergegeven, kan het een minuut duren voordat de batterijstatus wordt getoond.
Laad de Rover gedurende enkele minuten op en wacht totdat de batterijstatus wordt weergegeven.
Als u de Rover volledig wilt uitschakelen, zet u de POWER-schakelaar op OFF en koppelt u de USB-kabel los van de grafische rekenmachine.
Dit kan gebeuren als de twee motoren niet dezelfde interne kalibratie hebben. Wij zijn ons bewust van dit probleem en werken aan een oplossing via een update van de sketch van de Hub.
Controleer of u de juiste oriëntatie voor de tabs gebruikt. In de tabs is ‘CE’ of ‘CX’ gegraveerd voor respectievelijk de TI84Plus CE-serie en de TI-Nspire CX-serie rekenmachines.
Raadpleeg de testprogramma’s.
Kijk of er verbindingen los zijn.
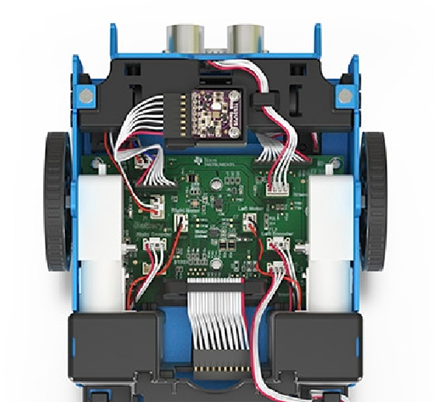
Raadpleeg het onderstaande bedradingsschema.
| - | Controleer of de zwenkwieltjes vuil zijn. |
| - | Gebruik perslucht om ze schoon te maken. |
| - | De banden zijn mogelijk losgeraakt. Controleer of zij nog goed op het wieltje zitten. |
| - | Een egale, vlakke ondergrond wordt aanbevolen. |
| - | Hoe kan ik controleren of zij nog goed op het wieltje zitten? |
Lijn de pennen opnieuw uit volgens de oorspronkelijke configuratie voordat u ze vastmaakt aan de Hub.
Deze opdrachten worden geïmplementeerd in een toekomstige versie van de sketch voor de Hub.
| - | Demo: Programma’s om zaken voor elkaar te krijgen. Maak een testrit. |
| - | Testprogramma’s: probeer telkens één onderdeel tegelijk. Controleer of zij werken. |
![]()
De volgende stappen voor het oplossen van problemen, helpen om te bepalen of er iets mis is met de I/O-module voor de witte LED.
| - | Controleer of de LED correct in de fitting is geplaatst. |
| - | Steek LED in aansluiting - langere poot (aansluitdraad) is positief (anode). Als beide geleidedraden even lang zijn, is de draad die zich het dichtst bij de platte rand van de LED-behuizing bevindt de negatieve geleidedraad (kathode). |
| - | Download het testprogramma en voer het uit om uw module voor de witte LED te testen. |
| - | Controleer of u de I/O-module op de juiste poort heeft aangesloten zoals wordt vereist door het programma |
De volgende stappen voor het oplossen van problemen helpen om te bepalen of er iets mis is met de I/O-module voor de analoge lichtsensor.
| - | Download het testprogramma en voer het uit om uw I/O-module voor de analoge lichtsensor te testen. |
| - | Controleer of u de I/O-module op de juiste poort heeft aangesloten zoals wordt vereist door het programma |
De volgende stappen voor het oplossen van problemen helpen om te bepalen of er iets mis is met de I/O-module voor de vibratiemotor.
| - | Download het testprogramma en voer het uit om uw I/O-module voor de vibratiemotor te testen. |
| - | Controleer of u de I/O-module op de juiste poort heeft aangesloten die wordt vereist door het programma. |
De volgende stappen voor het oplossen van problemen helpen om te bepalen of er iets mis is met de I/O-module voor de servomotor.
| - | Download het testprogramma en voer het uit om uw I/O-module voor de servomotor te testen. |
| - | Controleer of u de I/O-module op UIT 3 heeft aangesloten en of het programma dat u gebruikt UIT 3 aanroept. |
| - | De servomotor vereist dat de TI-Innovator™ Hub over externe voeding beschikt. Met de PWR-aansluiting op de hub kunt u een externe voedingsbron aansluiten. U kunt de TI-wandoplader of de externe batterij gebruiken. Er is externe voeding vereist als de TI-Innovator™ |
| - | Na verloop van tijd moet de servomotor mogelijk opnieuw worden gekalibreerd. Stappen voor herkalibratie: |
| - | Sluit de externe voeding aan op de TI-Innovator |
| - | Sluit servomotor aan op UIT3 |
| - | Verzend de opdracht ‘SLUIT SERVO 1 AAN OP UIT3’ |
| - | Verzend de opdracht ‘STEL SERVO 1 IN OP CW 0 TIJD 100’ (Hiermee wordt het toerental ingesteld op nul, de waarde voor de tijd kan zo nodig worden verhoogd) |
| - | Als de servo niet beweegt, is deze al gekalibreerd. Als de servo wel beweegt, gebruikt u een schroevendraaier om de potentiometer achter in de motor te verplaatsen totdat de motor stopt. |
De volgende stappen voor het oplossen van problemen helpen om te bepalen of er iets mis is met de I/O-module voor de ultrasoon afstandsmeter (ranger).
| - | Download het testprogramma en voer het uit om uw I/O-module voor de ultrasoon afstandsmeter (ranger) te testen. |
| - | Controleer of u de I/O-module op de juiste poort heeft aangesloten die wordt vereist door het programma. |
De positie van de sensor die is ingebouwd in de TI-Innovator™
![]()
| • | TI-SensorLink is geen oplossing voor het verzamelen van data. Gebruik van de USB-aangesloten sondes of Lab-Cradle blijft een superieure oplossing voor pure dataverzameling en -analyse. |
| • | De Hub-opdrachten voor de TI-SensorLink met de analoge Vernier-sensoren maken momenteel geen deel uit van de Hub-app (CE-serie) of het Hub-menu (TI-Nspire™ CX). |
| • | De nieuwe opdrachten en trefwoorden moeten ofwel worden ingetypt OF worden gekopieerd uit een bestaand programma. Houd er rekening mee dat typografische fouten in de trefwoorden een foutmelding in de sketch tot gevolg zullen hebben. |
![]()
| - | Als u code vanaf een externe bron of teksteditor gekopieerd en geplakt heeft, kan deze code "gekrulde" aanhalingstekens bevatten (“...”) op plaatsen waar rechte aanhalingstekens moeten staan ("..."). Mogelijk dient u enkele of alle gekrulde aanhalingstekens te vervangen door rechte aanhalingstekens. |
| - | De syntaxregels zijn enigszins verschillend voor de TI CE grafische rekenmachine en de TI-Nspire™ CX-technologie. Code die oorspronkelijk voor het ene platform geschreven is, dient mogelijk te worden aangepast om op het andere platform te kunnen functioneren. |
| - | Zorg er op de TI CE grafische rekenmachine voor dat u geen spatie zet aan het einde van een regel code. Om deze spaties aan het einde van een regel te vinden, verplaatst u de cursor naar de regel en drukt u op [2nd] en vervolgens op de toets met het pijltje naar rechts. Aangrenzende spaties in code kunnen ook een syntaxisfout veroorzaken. |
| - | TI CE grafische rekenmachine: Druk op de AAN-toets. |
| - | TI-Nspire™ CX-rekenmachine: Houd de Home/ON-toets ingedrukt en druk meerdere malen op ENTER. |
| - | Windows®: Houd de F12-toets ingedrukt en druk meerdere malen op Enter. |
| - | Mac®: Houd de F5-toets ingedrukt en druk meerdere malen op Enter. |
Zorg ervoor dat u gebruikmaakt van de meest recente versie van de TI-SmartView CE-software, versie 5.2. Met deze versie wordt de app ‘
De opdrachten van de TI-Innovator™
De fout-LED knippert als de opdrachtstructuur een fout bevat en de sketch de opdrachten niet kan verwerken. Bekijk de voorbeeldopdrachten voor de ingebouwde I/O-modules en breadboard-onderdelen voor ideeën voor het aanpassen van uw programma.
![]()
| - | Als u de sketch wilt bijwerken, zorg er dan voor dat u de standaard A naar micro-USB-kabel gebruikt, niet de standaard A naar mini-B USB-kabel. Sluit het uiteinde van de kabel met de microstekker aan op de PWR-aansluiting aan de bovenkant van de hub. |
| - | Dit kan duiden op een kabelprobleem. Sommige USB-kabels dienen uitsluitend voor de stroomvoorziening, niet voor gegevens. |
| - | Zorg ervoor dat u de kabel gebruikt die is meegeleverd met de TI-Innovator™ |
Yes.
![]()
| - | Druk op de aan/uit-knop om te controleren of de batterij aan staat. De externe batterij wordt na 3 minuten automatisch uitgeschakeld als deze niet is verbonden met de TI-Innovator™ |
| - | Controleer of de externe batterij is opgeladen. Druk op de aan/uit-knop. Als de LED-lampjes niet oplichten, moet de externe batterij worden opgeladen. |
![]()