Référence à la vue du dessous
| • | Évitez d’exposer le |
| • | Ne démontez pas et n’abîmez pas le |
| • | Évitez d’enchaîner plusieurs |
| • | Utilisez uniquement les câbles USB fournis avec le |
| • | Utilisez uniquement les blocs d’alimentation fournis par TI : |
| - | TI Wall Charger y compris avec le TI‑Innovator™ Hub |
| - | Optionnel External Battery Pack |
| - | Support 4 piles AA inclus dans le TI‑Innovator™ Breadboard Pack |
| • | Assurez-vous que les composants qui reçoivent de l’alimentation provenant du |
| • | Évitez d’utiliser le |
| • | N’insérez pas les fils des DEL et des autres composants directement dans le |
| • | Ne connectez pas le réceptacle à broche de 5 V situé sur le |
| • | Il n’est pas conseillé de connecter la rangée supérieure des broches fixes (BB1-10) à la rangée inférieure (broches de puissance et de mise à la terre. |
| • | Aucune broche sur le |
| • | Évitez de brancher les fils positifs et négatifs d’un bloc d’alimentation au même groupe de 5 broches de la platine d’essais. Sinon, la carte et le bloc d’alimentation pourraient être endommagés. |
| • | Respectez la polarité : |
| - | Lorsque vous branchez la platine d’essais sur le |
| - | Lorsque vous branchez les composants sensibles à la polarité, tels que les DEL et le transistor de puissance MOSFET. |
| • | Utilisez le port d’entrée ou de sortie, comme prévu, pour chaque module. |
| - | Moteur vibrant – pris en charge sur OUT 1, OUT 2 et OUT 3. |
| - | Servomoteur – utilisez uniquement OUT 3. |
| - | DEL blanche – prise en charge sur OUT 1, OUT 2 et OUT 3. |
| - | Capteur de lumière analogique – pris en charge sur IN 1, IN 2 et IN 3. |
| - | Capteur de distance à ultrasons – pris en charge sur IN 1 et IN 2. |
| • | Utilisez une source d’alimentation auxiliaire pour les modules qui requièrent une intensité de courant supérieure à 50 mA, notamment : |
| - | Moteur vibrant |
| - | Servomoteur |
| • | Évitez de tenir l’arbre du servomoteur lorsque ce dernier est en rotation. Par ailleurs, évitez de faire tourner le servomoteur à la main. |
| • | DEL blanche : |
| - | Évitez de plier les pattes de manière répétée ; sinon, elles pourront s’affaiblir et se rompre. |
| - | La DEL doit être insérée dans son support en respectant la polarité. Pour plus de détails, reportez-vous aux instructions de montage des DEL dans TI‑Innovator™ eGuide de la technologie (ici). |
| - | La DEL doit être insérée dans son support en respectant la polarité. Pour plus de détails, reportez-vous aux instructions de montage de la DEL (ici). |
| • | Aucun module E/S ne peut absorber ou fournir une intensité de courant supérieure à 4 mA. |
| • | Évitez d’exposer le |
| • | Ne démontez pas et n’abîmez pas le |
| • | Ne poser aucun objet d’un poids supérieur à 1 kg ou 2,2 lb sur la |
| • | Utilisez uniquement les câbles USB fournis avec le |
| • | Utilisez uniquement les câbles ruban fournis avec le |
| • | Utilisez uniquement le chargeur mural TI inclus avec le |
| • | Le capteur de distance à ultrasons |
| • | Pour de meilleurs résultats, retirez l’étui de protection de votre calculatrice graphique. |
| • | Pour de meilleures performances, utilisez le |
| • | Pour de meilleures performances, utilisez le |
| • | Ne pas tourner les attaches de support sur la plateforme pour calculatrice avant de les soulever en premier lieu. Elles pourraient se casser. |
| • | Ne pas utiliser le marqueur comme levier pour pousser ou tirer le |
| • | Ne pas dévisser le boîtier situé sous le |
| • | Ne déplacez pas Rover après avoir exécuté un programme. Le gyroscope interne peut involontairement tenter de remettre le Rover sur la bonne voie en utilisant l'emplacement initial. |
| • | Lors de l’insertion du câble ruban de la platine d’essais dans le |
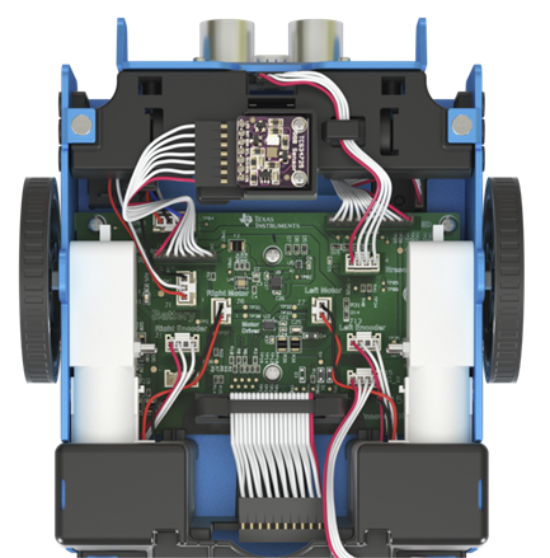
Attention : Si vous délogez ou déconnectez un des câbles, utilisez cette image comme référence pour des branchements corrects.
|
Référence à la vue du dessous |
|---|
|
|