B” (Datos B) que está en la parte inferior de
B” (Datos B) que está en la parte inferior de Esta sección describe algunos problemas que pueden surgir y ofrece sugerencias sobre cómo resolver el problema.
Si necesita más asistencia, comuníquese con TI-Cares.
TI-Innovator™ Hub Solución de problemas
Solución de problemas de los componentes incorporados
Solución del problemas del TI-Innovator™ Rover
Solución de problemas del módulo de E/S
Cómo programar con la solución de problemas de TI-Basic
| - | Asegúrese de que la calculadora esté encendida. |
| - | Si está utilizando un cable USB del tipo unidad a unidad (mini A a mini B) para conectarse a una calculadora, asegúrese de conectar el extremo “B” del cable al puerto “DATA B” (Datos B) que está en la parte inferior de |
| - | Asegúrese de que su calculadora tenga el sistema operativo más reciente. |
| - | Asegúrese de que el extremo del cable USB conectado a la calculadora esté insertado completamente. |
| - | Desconecte el cable USB del TI-Innovator™ |
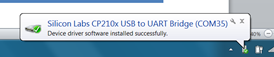
| - | Asegúrese de que esta utilizando la más reciente del software TI-Nspire™ CX. La versión más reciente instala un controlador que permite que la computadora reconozca el TI-Innovator™ |
| - | Asegúrese de que está conectándose al TI-Innovator™ Hub a través del puerto “DATA B” del puerto del TI-Innovator™ |
| - | Desconecte el cable USB del TI-Innovator™ |
| - | Si no utiliza el cable USB que se suministra con el TI-Innovator™ |
| - | Apague la calculadora o la computadora usada como host. |
- O -
| - | Desconecte el cable USB. |
Si la luz LED de errores parpadea y la bocina reproduce un tono, existe un error en el comando que se está enviando al TI-Innovator™
El TI-Innovator™
![]()
| - | Descargue el programa de pruebas y ejecútelo para probar el componente incorporado. |
| - | Asegúrese de que el programa utilice valores que están alineados con los rangos que son compatibles con los componentes incorporados |
| - | RGB: Rango entre 0 a 255 para el nivel de intensidad |
| - | Bocina: Rango entre 40 a 4000 Hz |
Los comandos de COLOR/RGB incorporado y los comandos SOUND/SPEAKER (sonido/bocina) no se pueden utilizar al mismo tiempo. Los programas del usuario deben esperar a que finalice el comando SOUND/SPEAKER antes de enviar el comando COLOR/RGB al TI-Innovator™
Las fuentes de luz LED parpadean a velocidades altas. Si bien el ojo humano no puede detectar este parpadeo, el sensor de brillo de luz si registra el parpadeo e informa los valores en su lectura.
![]()
| - | Revise para asegurarse de que esté cargado |
| - | Asegúrese de que esté encendido. |
| - | Asegúrese de que todos los cables estén conectados. |
| - | Asegúrese de que el cable de la placa de pruebas tenga la configuración correcta (cable rojo en el lado correcto) |
| - | Asegúrese de que los pernos de la placa de pruebas estén derechos. |
| - | Asegúrese de que tenga el último sketch |
| - | Asegúrese de que tenga el último SO |
| - | Intente con el programa de prueba |
| - | No hay nada además de la calculadora en la parte superior del Rover. |
| - | Si utiliza el sujetador de pluma, asegúrese de que la pluma no esté demasiado lejos como para levantar el Rover. |
| - | Limpie las ruedas |
| - | Utilice una superficie suave y plana para obtener mejores resultados |
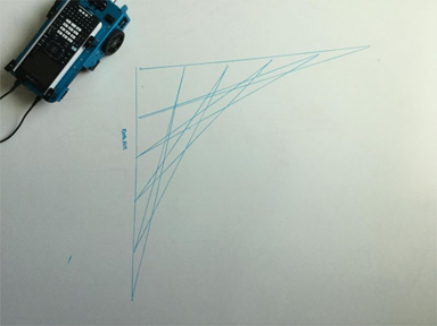
| - | Revise si la orientación se ajusta a las expectativas de su programa. |
| - | El Rover no es una herramienta de dibujo de precisión. Debe esperar un nivel de imprecisión con formas específicas. |
| - | Cuando gira, el Rover puede tener una variación de +/- 0.5 grados. Mientras más cantidad de segmentos (o giros) haya, habrá más mezcla de variación. |
| - | Las mejores superficies para utilizar el Rover son superficies suaves y planas (no en alfombras o mosaicos) |
Existen dos métodos para dibujar figuras (o funciones) con el Rover.
Tienen diferentes niveles de precisión y pueden tener diferentes resultados, incluso para la misma figura general (por ejemplo, octágono).
Método 1: Uso de FORWARD/BACKWARD/LEFT/RIGHT: estos comandos mueven el Rover a la distancia y al ángulo especificados. El movimiento angular puede no ser exacto y depende de la superficie y de la presencia del marcador.
Método 2: Uso de 'TO XY', 'TO POLAR': estos comandos mueven el Rover a coordenadas específicas con giros más exactos. Incluso con estos comandos, se agregan errores pequeños después de varios segmentos. Las funciones y figuras que utilizan un tamaño grande de cuadrícula o más de 18 segmentos pueden dar como resultado un dibujo que no coincida con la forma esperada.
Existen dos comandos diferentes relacionados al giro del Rover
| - | Comandos RV LEFT/RV RIGHT: Estos comandos le indican al Rover que gire un ángulo especificado relacionado con la posición actual del Rover. |
| - | RV TO ANGLE: este comando mueve el roven a un ángulo específico en relación al círculo unitario |

RV LEFT 30
RV LEFT 45
Colocará el Rover en un ángulo de 75 grados
RV TO ANGLE 30
RV TO ANGLE 45
Colocará el Rover en un ángulo de 45 grados
Compruebe que su programa utilice el comando de encendido que se ajuste a sus expectativas del movimiento del Rover.
Estos comandos utilizan grados como la unidad predeterminada, incluso si la configuración de la calculadora está en radianes.
Puede especificar RADIANS o GRADS (gradianes) para que el Rover encienda el comando por medio del menú "Hub -> Rover (RV) -> Ajuste del RV"
El Rover utiliza una unidad predeterminada de 10 cm (~4 pulgadas).
El comando RV FORWARD 1 hará que el Rover avance 10 cm
Equivale a los comandos "RV FORWARD 1 UNITS" y "RV FORWARD 0.1 M"
Para mover el Rover a distancias específicas, puede utilizar el ajuste 'M' para especificar los metros.
El sujetador del marcador soporta marcadores delgados comunes o marcadores de borrado en seco. El sujetador del marcador está diseñado para dejar que la gravedad haga el trabajo de mantener el marcador en su lugar. La punta del marcador permanecerá en la ubicación adecuada incluso si hay movimiento en el otro extremo del marcador.
La posición predeterminada del Rover está en el origen del punto de la cuadrícula cartesiana, debajo del eje positivo X.
La orientación original es la siguiente: posición (0,0), encabezado 0 grados (este, apuntando hacia el eje positivo X).
TO XY primero gira al ángulo adecuado y después se mueve directo al punto.
TO XY 1 1 gira 45 grados a la izquierda y después mueve unidades sqrt(2) (a 10 cm/unidad = 14.14 cm).
Vea también Rover>Ajuste>SET RV.POSITION
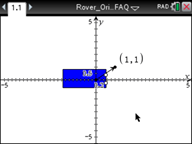
Table 1: Ejemplo 1:
|
|
|
Los comandos del Rover se dividen en dos categorías:
| 1. | Ejecución en fila: Todos los comandos de movimiento del Rover (FORWARD, BACKWARD, LEFT, RIGHT, ANGLE) están en fila en el TI-Innovator Hub. Se pueden ejecutar en el futuro. |
| 2. | Ejecución inmediata: Otros comandos (como los de lectura de sensores o el establecimiento de la luz LED RGB en el Rover) se ejecutan inmediatamente. |
Esto significa que ciertos enunciados en su programa se ejecutarán antes que los enunciados que aparecen antes en el programa, especialmente si los últimos comandos son parte de la familia en la fila.
Por ejemplo, en el programa a continuación, la luz LED RGB se volverá ROJA antes de que el Rover detenga el movimiento:
Send "SET RV.COLOR 255 0 255" – immediately executed
Send "RV FORWARD 5" – queued command
Send "RV LEFT 45" – queued command
Send "RV RIGHT 90" – queued command
Send "SET RV.COLOR 255 0 0" – immediately executed
Esto puede suceder si los comandos están en fila para una ejecución posterior. La calculadora dice “Listo” porque los programas terminaron de enviar todos los comandos al TI-Innovator Hub. El Hub ejecutará los comandos para controlar el Rover aunque el programa de la calculadora esté completo.
Mientras que generalmente el estado de carga de la batería se muestra inmediatamente, puede tomar un minuto para que se muestre el estado de la batería.
Cargue el Rover un par de minutos y espere a que se muestre el estado de la batería.
Para deshabilitar completamente el Rover, APAGUE el interruptor de energía y desconecte el cable USB de la calculadora gráfica.
Esto sucede si los dos motores no tienen una calibración interna similar. Somos conscientes de este problema y estamos trabajando para una solución por medio de una actualización del sketch del Hub.
Asegúrese de que está utilizando la orientación correcta en las pestañas. Las pestañas tienen los grabados “CE” y “CX” para ajustarse a la familia TI84Plus CE y a la familia TI-Nspire CX de las calculadoras, respectivamente.
Consulte los programas de prueba.
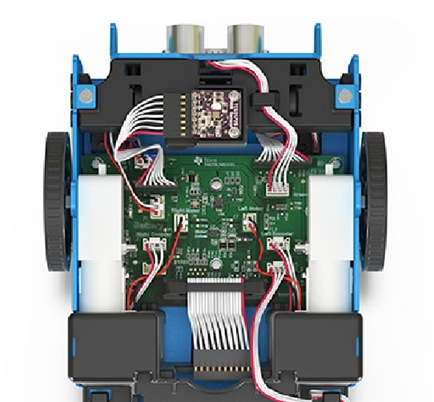
Busque conexiones flojas.
Consulte el diagrama de cableado a continuación como referencia.
| - | Revise que las ruedas no tengan escombros |
| - | Utilice aire comprimido para limpiar. |
| - | Las ruedas pueden haberse aflojado. Revise para asegurarse de que estén completamente apegadas a la rueda. |
| - | Se recomienda una superficie suave y plana. |
| - | Cómo revisar para asegurarse de que estén completamente apegadas a la rueda. |
Vuelva a alinear los pernos en la configuración original antes de colocarlos en el Hub.
Estos comandos se implementarán en un lanzamiento futuro del sketch del Hub.
| - | Demostración: Programas para hacer cosas. Úselos para manejo de prueba. |
| - | Programas de prueba: pruebe con un componente a la vez. Asegúrese de que funcionen. |
![]()
Los siguientes pasos de solución de problemas determinarán si hay algún error con el módulo de E/S de la luz blanca.
| - | Asegúrese de que la luz LED esté insertada apropiadamente en el enchufe. |
| - | Insertar la luz LED en el enchufe: la pata más larga (conductor) es positiva (ánodo). Si ambos cables tiene el mismo largo, el cable que está junto al borde plano en la carcasa de la luz LED es el conductor negativo (cátodo). |
| - | Descargue el programa de pruebas y ejecútelo para probar el componente del módulo de luz LED blanca. |
| - | Asegúrese de que conectó el módulo de E/S en el puerto correcto que requiere el programa |
Los siguientes pasos de solución de problemas determinarán si hay algún error con el módulo de E/S del sensor analógico de luz.
| - | Descargue el programa de pruebas y ejecútelo para probar el componente del módulo de E/S del sensor analógico de luz. |
| - | Asegúrese de que conectó el módulo de E/S en el puerto correcto que requiere el programa |
Los siguientes pasos de solución de problemas determinarán si hay algún error con el módulo de E/S del motor de vibración.
| - | Descargue el programa de pruebas y ejecútelo para probar el componente del módulo de E/S del motor de vibración. |
| - | Asegúrese de que conectó el módulo de E/S en el puerto correcto que requiere el programa. |
Los siguientes pasos de solución de problemas determinarán si hay algún error con el módulo de E/S del servomotor.
| - | Descargue el programa de pruebas y ejecútelo para probar el componente del módulo de E/S del motor de vibración. |
| - | Asegúrese de que conectó el módulo de E/S en OUT3 y que el programa que utiliza está llamando a OUT3. |
| - | El servo motor requiere que el TI-Innovator™ Hub cuente con energía externa. El conector PWR en el hub le permite conectar una fuente de energía auxiliar. Puede utilizar el adaptador de pared TI o la batería externa. La energía externa se requiere si el TI-Innovator™ |
| - | Con el tiempo es posible que el servomotor deba recalibrarse. Pasos para realizar la recalibración: |
| - | Conectar la energía externa al TI-Innovator |
| - | Conectar el servomotor al OUT3 |
| - | Enviar el comando “CONNECT SERVO 1 TO OUT 3” |
| - | Enviar el comando “SET SERVO 1 CW 0 TIME 100” (configura la velocidad a cero; el valor del tiempo se puede aumentar en caso necesario) |
| - | Si el servo no se mueve, entonces ya está calibrado, si el servo se mueve, utilice un destornillador para mover el potenciómetro que se encuentra la parte posterior del motor hasta que este se detenga. |
Los siguientes pasos de solución de problemas determinarán si hay algún error con el módulo de E/S del medidor de rango ultrasónico.
| - | Descargue el programa de pruebas y ejecútelo para probar el componente del módulo de E/S del medidor de rango ultrasónico. |
| - | Asegúrese de que conectó el módulo de E/S en el puerto correcto que requiere el programa. |
La posición del sensor integrado en el TI-Innovator™
![]()
| • | El TI-SensorLink no es una solución para la recolección de datos. Los sensores de USB conectados o el soporte inalámbrico de laboratorio sigue siendo una solución superior para la recolección de datos pura y el análisis. |
| • | Los comandos del Hub del TI-SensorLink con los sensores análogos Vernier actualmente no son parte de la aplicación Hub (familia CE) o del menú del Hub (TI-Nspire™ CX). |
| • | Los comandos y las palabras clave nuevas deben escribirse O copiarse de un programa existente. Tenga en cuenta que cualquier error tipográfico en las palabras clave provocará una señal de error en el diagrama. |
![]()
| - | Si pegó un código desde una fuente externa o el editor de texto, este podría contener comillas "tipográficas” (“...”) en lugares donde se requieren comillas rectas ("..."). Posible que sea necesario reemplazar algunas o todas las comillas tipográficas. |
| - | Las reglas de sintaxis son ligeramente diferentes entre la calculadora graficadora TI CE y la tecnología TI-Nspire™ CX. Es posible que un código creado originalmente para una plataforma deba modificarse para funcionar en la otra. |
| - | En la calculadora graficadora TI CE, asegúrese de no tener un espacio al final de una línea de código. Para encontrar estos espacios finales en una línea, mueva el cursor hasta la línea y presione [2nd] y después la tecla de flecha derecha. Los espacios adyacentes en un código también podrían causar un error de sintaxis. |
| - | Calculadora graficadora TI CE: Presione la tecla ON (encender). |
| - | Dispositivo portátil TI-Nspire™ CX: Mantenga presionada la tecla Home/ON (Inicio/encender) y presione INTRO varias veces. |
| - | Windows®: Mantenga presionada la tecla F12 y presione Intro varias veces. |
| - | Mac®: Mantenga presionada la tecla F5 y presione Intro varias veces. |
Asegúrese de que esta utilizando la más reciente del TI-SmartView CE, que es la versión 5.2. Esta versión instala la aplicación “
Se han agregado comandos del TI-Innovator™
La luz LED de errores parpadeará si existe un error en la estructura del comando y el diagrama no puede procesar los comandos. Revise los comandos de muestra para los componentes incorporados, los módulos de E/S, y los componentes de la placa de pruebas para obtener ideas sobre cómo modificar su programa.
![]()
| - | Para actualizar el diagrama, asegúrese de estar utilizando el cable USB estándar A a micro, no el cable USB estándar A a mini B. Conecte el extremo más pequeño (micro) del cable al conector PWR en la parte superior del Hub. |
| - | Esto podría deberse a un problema con el cable. Algunos cables USB son solo para potencia, no para datos. |
| - | Asegúrese de que utiliza el cable que viene con el TI-Innovator™ |
Yes.
![]()
| - | Presione el botón encendido/apagado para asegurarse de que la batería está activada. La batería externa se apagará automáticamente en 3 minutos si no se conecta con el TI-Innovator™ |
| - | Asegúrese de que la batería externa tenga carga. Presione el botón de encendido/apagado. Si las luces LED no se encienden es porque la batería externa debe recargarse. |
![]()