Cette section décrit certaines difficultés que vous pouvez rencontrer et fait des suggestions quant à la manière de les surmonter.
Si vous avez besoin d’autres informations, prenez contact avec TI-Cares.
Dépannage du TI-Innovator™ Hub
La calculatrice graphique TI CE ou la TI-Nspire™ CX ne reconnaît pas le TI-Innovator™ Hub , que faire ? Je ne vois pas la DEL verte lorsque je branche ma calculatrice graphique TI CE ou ma TI-Nspire™ CX au hub TI-Innovator™ ?
| - | Vérifiez que la calculatrice est mise sous tension. |
| - | Si vous utilisez un câble unité à unité (USB A mini - USB B mini) pour la connexion à une calculatrice, veillez à brancher l’extrémité « B » du câble au port « DATA  B » situé dans la partie inférieure du B » situé dans la partie inférieure du |
| - | Vérifiez que la calculatrice est dotée du système d’exploitation le plus récent. |
| - | Vérifiez que l’extrémité du câble USB branché sur la calculatrice est complètement insérée. |
| - | Débranchez le câble USB du TI-Innovator™ |
Le logiciel TI-Nspire™ CX ne reconnaît pas le TI-Innovator™ Hub , que faire ?
| - | Assurez-vous que vous utilisez la version la plus récente du logiciel TI-Nspire™ CX. La version la plus récente installe un pilote qui permet à l’ordinateur de reconnaître le TI-Innovator™ |
| - | Assurez-vous que vous vous connectez au Hub TI-Innovator™ à l’aide du port « DATA B » sur le port TI-Innovator™ |
| - | Débranchez le câble USB du TI-Innovator™ |
| - | Si vous n’utilisez pas le câble USB fourni avec le TI-Innovator™ |
Comment éteindre le Hub ?
| - | Éteignez la calculatrice hôte ou l’ordinateur |
– OU –
| - | Débranchez le câble USB. |
Quel problème se pose-t-il lorsque la DEL d’erreur clignote et que le haut-parleur émet une tonalité ?
Si la DEL d’erreur clignote et que le haut-parleur émet une tonalité, cela signifie qu’il y a une erreur dans les commandes envoyées au TI-Innovator™
Pourquoi un pilote de Silicon Labs CP210x est-il installé sur mon ordinateur lorsque je branche le TI-Innovator™ Hub ?
Le TI-Innovator™
![]()
Dépannage des composants intégrés du hub
Mon programme ne fonctionne pas avec le composant intégré, comment savoir si le composant intégré n’est pas en panne ?
| - | Téléchargez le programme test, puis exécutez-le pour tester votre composant intégré. |
| - | Vérifiez que votre programme utilise les valeurs conformes aux plages que les composants intégrés prennent en charge |
| - | RVB : Varie de 0 à 255 pour le niveau d’intensité |
| - | Haut-parleur : Étendue de 40 à 4 000 Hz |
Pourquoi la DEL RVB intégrée s’arrête-t-elle chaque fois que je joue une tonalité sur le haut-parleur ? Pourquoi m’est-il impossible de contrôler la DEL RVB intégrée lorsque le son est en cours de lecture ?
Il est impossible d’utiliser les commandes COLOR/RGB et SOUND/SPEAKER simultanément. Les programmes d’utilisateur doivent attendre jusqu’à ce que la commande SOUND/SPEAKER soit terminée avant d’envoyer la commande COLOR/RGB à TI-Innovator™
Le capteur de niveau de lumière intégré affiche des modifications de relevés même si ma source lumineuse n’est pas modifiée, pourquoi ? Les relevés de luminosité basculent entre les valeurs max. et min. alors que je m’attends à une valeur constante ?
Les sources lumineuses DEL vacillent à grande vitesse. Si l’œil humain ne peut pas détecter ce vacillement, le capteur de luminosité de la lumière enregistre bel et bien ce vacillement et rend compte des valeurs qu’il lit.
![]()
Dépannage du TI-Innovator™ Rover
Mon Rover ne fonctionne pas comme prévu. Pourquoi ?
| - | Vérifiez qu’il est bien chargé |
| - | Assurez-vous qu’il est allumé. |
| - | Assurez-vous que tous les câbles sont branchés. |
| - | Vérifiez que le câble de la platine d’essais est dans une configuration correcte (le fil rouge à la bonne extrémité) |
| - | Vérifiez que les broches de la platine d’essais sont droites. |
| - | Vérifiez que vous avez la version la plus récente du sketch |
| - | Vérifiez que vous avez la version la plus récente du système d’exploitation |
| - | Essayez le programme test |
| - | Ne mettez rien à côté de la calculatrice sur le dessus du Rover. |
Mon Rover ne bouge pas, ou il ne bouge pas correctement. Pourquoi ?
| - | Si vous utilisez le support à crayon, assurez-vous que le crayon n’est pas inséré trop loin et qu’il ne soulève pas le Rover. |
| - | Nettoyez les roulettes. |
| - | Utilisez sur une surface lisse et plane pour de meilleurs résultats |
| - | Vérifiez si l’orientation correspond aux attentes de votre programme. |
Le Rover n’a pas dessiné la forme à laquelle je m’attendais. Pourquoi ?
| - | Le Rover n’est pas un outil de dessin de précision. Vous devez vous attendre à un niveau d’imprécision avec des formes spécifiques. |
| - | La rotation du Rover peut varier de +/- 0,5 degré. Plus il y a de segments (ou de rotations), plus cette variation peut augmenter. |
| - | Les meilleures surfaces pour utiliser le Rover sont une surface lisse et plane (pas de la moquette ni du carrelage). |
Quel est le nombre de segments ou de rotations recommandé pour tracer la forme prévue ?
Il existe deux méthodes pour tracer des formes (ou des fonctions) avec le Rover.
Selon la méthode, le niveau de précision varie et peut produire différents résultats, y compris lorsqu'il s'agit de la même forme générique (par ex. un octogone).
Méthode 1 : Utilisation des commandes FORWARD/BACKWARD/LEFT/RIGHT : elles permettent au Rover de se déplacer de la distance et de l'angle indiqués. Le mouvement angulaire n'est pas toujours précis et varie en fonction de la surface et de la présence du marqueur.
Méthode 2 Utilisation des commandes « TO XY », « TO POLAR » : elles permettent au Rover de se déplacer vers des coordonnées spécifiques avec des rotations plus précises. Même avec ces commandes, les petites erreurs s'accumulent au fil des segments. Les formes et fonctions qui utilisent une grille de grande taille et/ou plus de 18 segments peuvent produire un dessin qui ne correspond pas à la forme prévue.
Mon Rover tourne plus ou moins que prévu. Pourquoi ?
Il existe deux commandes différentes liées à la rotation du Rover
| - | Commandes RV LEFT/RV RIGHT : ces commandes ordonneront au Rover de tourner d'un angle indiqué par rapport à sa position actuelle. |
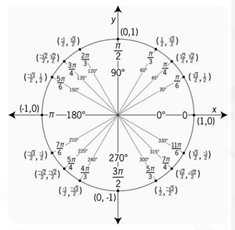
| - | RV TO ANGLE : cette commande permet de déplacer le Rover d'un angle spécifique sur le cercle unité |
Exemples :
RV LEFT 30
RV LEFT 45
Déplacement du Rover d'un angle de 75 degrés
Par comparaison
RV TO ANGLE 30
RV TO ANGLE 45
Déplacement du Rover d'un angle de 45 degrés
Assurez-vous que la commande de rotation de votre programme correspond aux mouvements que vous voulez que le Rover accomplisse.
Ces commandes utilisent les degrés comme unité par défaut, même si le réglage de la calculatrice est en radians.
Dans la commande, vous pouvez choisir RADIANS ou GRADS (grades) pour spécifier l'unité de rotation du Rover à l'aide du menu « Hub -> Rover (RV) -> RV Settings »
Le Rover ne parcourt pas la distance prévue. Pourquoi ?
Le Rover utilise une unité par défaut de 10 cm (~ 4 po).
Par conséquent, la commande « RV FORWARD 1 » fera avancer le Rover de 10 cm
Elle équivaut aux commandes « RV FORWARD 1 UNITS » et « RV FORWARD 0.1 M »
Pour que le Rover se déplace d'une distance spécifique, vous pouvez indiquer le nombre de mètres en utilisant le paramètre « M ».
Mon marqueur bouge dans le porte-marqueur. Pourquoi ?
Le porte-marqueur permet d'utiliser des marqueurs à pointe fine ou effaçables. Le porte-marqueur est conçu de manière à maintenir et immobiliser le marqueur par son propre poids. La pointe du marqueur restera au bon endroit, même si l'autre extrémité du marqueur oscille légèrement.
Dans quelle direction pointe le Rover quand je commence un programme ?
La position par défaut du Rover est à l'origine d'un repère cartésien, dirigé vers l'axe des X positifs.
Orientation initiale : position (0,0) ; direction 0 degré (est – pointe vers l'axe des X positifs).
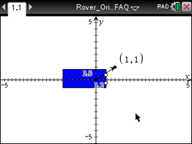
La commande « TO XY » fait d'abord tourner le Rover de l'angle approprié, puis le déplace directement jusqu'au point.
Par exemple :
La commande « TO XY 1 1 » fait tourner le Rover de 45 degrés vers la gauche, puis le déplace de racine(2) unités (racine(2)*10 cm/unité = 14,14 cm).
Voir aussi Rover>Setup>SET RV.POSITION
Quelques commandes XY ou Polar sympas pour commencer
Table 1: Exemple 1 :
|
|
|
Pourquoi mon programme Rover n’est pas exécuté dans l’ordre ?
Les commandes du Rover entrent dans deux catégories :
| 1. | Exécution mise en file d’attente : Toutes les commandes de mouvement du Rover (FORWARD, BACKWARD, LEFT, RIGHT, ANGLE) sont mises en file d’attente sur le TI-Innovator Hub. Elles peuvent être exécutées ultérieurement. |
| 2. | Exécution immédiate : Les autres commandes (comme celles pour lire les capteurs ou configurer la DEL RVB sur le Rover) sont exécutées immédiatement. |
Cela signifie que certaines instructions dans votre programme s’exécuteront avant des instructions qui s’affichent plus tôt dans le programme, surtout si ces dernières commandes font partie de la famille mise en file d’attente.
Par exemple, dans le programme ci-dessous, la DEL RVB s’allumera ROUGE avant que le Rover ne s’arrête de bouger :
Send "SET RV.COLOR 255 0 255" – immediately executed
Send "RV FORWARD 5" – queued command
Send "RV LEFT 45" – queued command
Send "RV RIGHT 90" – queued command
Send "SET RV.COLOR 255 0 0" – immediately executed
Pourquoi mon Rover fonctionne-t-il toujours même si ma calculatrice indique « Done » ?
Cela peut arriver si les commandes sont mises en file d’attente pour une exécution ultérieure. La calculatrice indique « Fait » car les programmes ont terminé d’envoyer toutes les commandes au TI-Innovator Hub. Le Hub exécutera les commandes pour contrôler le Rover même si le programme de la calculatrice est terminé.
Aucune alimentation de la batterie n’est visible lorsque je branche mon Rover. Pourquoi ?
Même si généralement l’état de charge de la batterie est affiché immédiatement, cela peut prendre une minute pour que l’état de la batterie s’affiche.
Mon Rover s'est éteint et ne veut plus démarrer. Que dois-je faire ?
Chargez le Rover pendant quelques minutes et attendez que l’état de la batterie s’affiche.
J’éteins le Rover mais le programme fonctionne toujours ou des éléments du Rover fonctionnent toujours. Pourquoi ?
Pour désactiver complètement le Rover, veuillez éteindre le bouton d’alimentation et débrancher le câble USB de la calculatrice graphique.
Pourquoi mon Rover ne se déplace-t-il pas en ligne droite ?
Cela peut arriver si les deux moteurs n’ont pas le même étalonnage interne. Nous sommes au courant de ce problème et travaillons à une solution via une mise à jour du sketch du Hub.
Ma calculatrice graphique ne s’ajuste pas sur le Rover.
Vérifiez que vous utilisez l’orientation correcte des cliquets. Les cliquets ont des gravures « CE » et « CX » pour s’adapter respectivement à la famille TI84Plus CE et la famille TI-Nspire CX des calculatrices.
Mon capteur intégré ne fonctionne pas. Ne donne pas les résultats attendus ou ne fournit aucune donnée
Reportez-vous aux programmes tests.
Recherche de mauvais branchements.
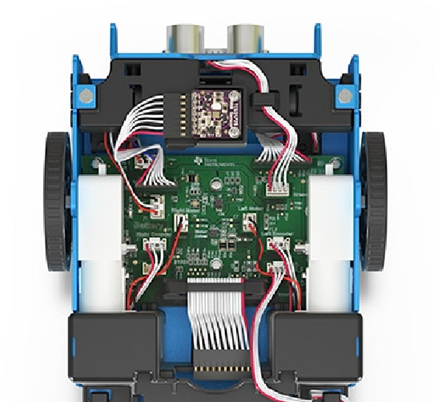
Mon élève a débranché tous les câbles, que faire ?
Veuillez vous reporter au schéma de câblage ci-dessous pour référence.
Mon Rover se déplace plus lentement ou il tourne d’une manière étrange.
| - | Vérifiez la roulette pour voir si elle est encrassée |
| - | Utilisez de l’air comprimé pour nettoyer. |
| - | Les pneus ont pu se détacher. Vérifiez qu’ils sont bien ajustés sur la roue. |
| - | Une surface plane et lisse est recommandée. |
Mes pneus se sont détachés.
| - | Comment vérifier qu’ils sont bien ajustés sur la roue ? |
Mes broches de la platine d’essais semblent pliées. Puis-je continuer à les utiliser ?
Veuillez réaligner les broches selon la configuration d’origine avant de les fixer au Hub.
Que font les commandes TO XY et TO POLAR ? Lorsque je les utilise, rien ne se passe avec mon Rover.
Ces commandes seront mises en œuvre dans une version future du sketch du Hub.
Comment puis-je commencer ? Vous voulez voir ce que le Rover peut faire ?
| - | Démo : Des programmes pour faire des choses. Prenez-le pour lui faire faire un test de conduite. |
| - | Programmes tests : essayez un composant à la fois. Assurez-vous qu’ils fonctionnent. |
![]()
Dépannage du module E/S
Mon module E/S de la DEL blanche ne fonctionne pas ; que dois-je faire ?
Les étapes de dépannage suivantes permettent d’établir se déterminer s’il y a un problème avec le module E/S de la DEL blanche.
| - | Vérifiez que la DEL est correctement insérée dans la prise. |
| - | Insérez la DEL dans la prise - la patte plus longue est positive (anode). Si les deux fils ont une longueur égale, le fil situé au voisinage du bord plat du boîtier est un fil négatif (cathode) |
| - | Téléchargez le programme test, puis exécutez-le pour tester votre composant de module de la DEL blanche. |
| - | Vérifiez que vous avez connecté le module E/S au port approprié requis par le programme |
Mon module E/S du capteur de lumière analogique ne fonctionne pas ; que dois-je faire ?
Les étapes de dépannage suivantes permettent d’établir se déterminer s’il y a un problème avec le module E/S du capteur de lumière analogique.
| - | Téléchargez le programme test, puis exécutez-le pour tester votre composant de module E/S du capteur de lumière analogique. |
| - | Vérifiez que vous avez connecté le module E/S au port approprié requis par le programme |
Le module E/S de mon moteur vibrant ne fonctionne pas ; que dois-je faire ?
Les étapes de dépannage suivantes permettent d’établir se déterminer s’il y a un problème avec le module E/S du moteur vibrant.
| - | Téléchargez le programme test, puis exécutez-le pour tester votre composant du module E/S de votre moteur vibrant. |
| - | Vérifiez que vous avez connecté le module E/S au port approprié requis par le programme. |
Le module E/S de mon servo-moteur vibrant ne fonctionne pas ; que dois-je faire ?
Les étapes de dépannage suivantes permettent d’établir se déterminer s’il y a un problème avec le module E/S du servomoteur.
| - | Téléchargez le programme test, puis exécutez-le pour tester votre composant du module E/S de votre servomoteur. |
| - | Vérifiez que vous avez connecté le module E/S au OUT3 et que le programme que vous utilisez appelle OUT3. |
| - | Le servomoteur nécessite que le hub TI-Innovator™ dispose d’une alimentation externe. Le connecteur PWR situé sur le hub vous permet de vous connecter à une source d’alimentation auxiliaire. Vous pouvez utiliser le chargeur mural TI ou la batterie externe. Une alimentation externe est requise si le TI-Innovator™ |
| - | Au fil du temps, le servomoteur peut nécessiter un réétalonnage. Étapes visant à réétalonner : |
| - | Branchez l’alimentation externe sur le TI- Innovator |
| - | Branchez le servomoteur sur OUT3 |
| - | Envoyez la commande « CONNECT SERVO 1 TO OUT3 » |
| - | Envoyez la commande « SET SERVO 1 CW 0 TIME 100 » (Définit la vitesse sur zéro, la valeur de temps peut être augmentée, si nécessaire) |
| - | Si le servo ne se déplace pas, alors il est déjà étalonné ; s’il se déplace, utilisez un tournevis pour déplacer le potentiomètre situé à l’arrière du moteur jusqu’à ce qu’il s’arrête. |
Le module E/S de mon capteur de distance à ultrasons ne fonctionne pas ; que dois-je faire ?
Les étapes de dépannage suivantes permettent d’aider à déterminer s’il y a un problème avec le module E/S du capteur de distance à ultrasons.
| - | Téléchargez le programme test, puis exécutez-le pour tester le composant du module E/S de votre capteur à ultrasons. |
| - | Vérifiez que vous avez connecté le module E/S au port approprié requis par le programme. |
Le capteur intégré pour la luminosité de la lumière et le module E/S du capteur de lumière analogique affichent des relevés légèrement différents ?
La position du capteur intégré dans le TI-Innovator™
![]()
Dépannage du TI-SensorLink
| • | Le TI-SensorLink n'est pas un outil d’acquisition de données. Les sondes à connexion USB ou le Lab Cradle restent des outils de choix dédiés à l’acquisition et à l'analyse des données. |
| • | Les commandes du Hub du TI-SensorLink avec les capteurs analogiques Vernier ne font pas actuellement partie de l'application Hub (gamme CE) ou du menu Hub (TI-Nspire™ CX). |
| • | Les nouvelles commandes et les nouveaux mots clés devront être tapés OU recopiés à partir d'un programme existant. Veuillez noter que toute erreur typographique dans les mots clés produira un message d'erreur dans le sketch. |
![]()
Dépannage de la programmation en TI-Basic
Pourquoi mon programme affiche-t-il une erreur de syntaxe ?
| - | Si vous avez collé un code provenant d’une source externe ou d’un éditeur de texte, il se peut qu’il contienne des guillemets « courbes » (“...”) dans des endroits nécessitant des guillemets droits ("..."). Il se peut vous ayez besoin de remplacer certains ou tous les guillemets courbes. |
| - | Les règles de syntaxe sont légèrement différentes entre la calculatrice graphique TI CE et la technologie TI-Nspire™ CX. Un code initialement créé par une plateforme peut nécessiter des modifications afin de fonctionner sur l’autre. |
| - | Sur la calculatrice graphique TI CE, assurez-vous que la fin de ligne de votre code ne comporte pas de caractère espace. Pour trouver ces espaces qui traînent dans une ligne, déplacez le curseur vers la ligne et appuyez sur le [2nd], puis sur la flèche droite. Des espaces adjacents présents dans un code peuvent également provoquer une erreur de syntaxe. |
Comment arrêter un programme qui ne répond plus ?
| - | Calculatrice graphique TI CE : Appuyez sur la touche ON. |
| - | Unité TI-Nspire™ CX : Maintenez enfoncée la touche Home/ON et appuyez plusieurs fois sur ENTER. |
| - | Windows® : Maintenez enfoncée la touche F12 et appuyez plusieurs fois sur Entrée. |
| - | Sur Mac® : Maintenez enfoncée la touche F5 et appuyez plusieurs fois sur Entrée. |
TI-SmartView CE n’affiche pas les commandes du hub dans le menu de programmation ?
Assurez-vous que vous utilisez la version la plus récente du logiciel TI-SmartView CE, version 5.2. Cette version installe l’application ‘
Le logiciel TI Connect™ n’affiche pas les commandes du hub, pourquoi ?
Les commandes du TI-Innovator™
Mon programme ne comporte pas d’erreurs de syntaxe, mais la DEL d’erreur affiche une erreur ?
La DEL d’erreur clignote s’il y a une erreur dans la structure de la commande et si le sketch est incapable de traiter les commandes. Revoyez les exemples de commandes pour les composants de platine d’essais, les modules E/S et intégrés pour voir comment modifier votre programme.
![]()
Dépannage du sketch de TI-Innovator™
Pourquoi y ‘a-t-il une erreur lorsque j’essaye de mettre à jour le Sketch de TI-Innovator™ ?
| - | Pour la mise à jour du sketch, assurez-vous d’utiliser le câble USB A standard - USB B micro, non pas le câble USB A standard - USB B mini. Branchez l’extrémité micro du câble sur le connecteur PWR situé sur la partie supérieure du hub. |
Mon TI-Innovator™ Hub indique qu’il est alimenté en électricité, mais il ne peut pas communiquer avec l’outil de mise à jour.
| - | Il peut s’agir d’un problème lié au câble. Certains câbles USB servent uniquement pour l’alimentation, mais non pas à transmettre les données. |
| - | Assurez-vous d’utiliser le câble qui est vendu avec le TI-Innovator™ |
Ai-je besoin de privilèges d’administrateur sur mon ordinateur pour effectuer une mise à jour de l’application sketch ?
Yes.
![]()
Dépannage de la batterie externe
Ma batterie externe ne semble pas fournir l’alimentation au TI-Innovator™ Hub .
| - | Appuyez sur la touche Marche/Arrêt pour vous assurer que la batterie est activée. La batterie externe s’éteint automatiquement au bout de 3 minutes si elle n’est pas connectée au TI-Innovator™ |
| - | Vérifiez que la batterie externe est chargée. Appuyez sur la touche Marche/Arrêt. Si les voyants DEL ne s’allument pas, il faut charger la batterie. |
![]()