Lesen von WAYPOINT (WEGPUNKT) und PATH (PFAD)
Verfolgen des RV-Pfads
Um die Analyse des Rover während eines Laufs und nach einem Lauf zu unterstützen, misst die Aufzeichnung automatisch die folgenden Informationen für jeden Drive-Befehl:
| • | x-Koordinate auf virtuellem Raster |
| • | y-Koordinate auf virtuellem Raster |
| • | Zeit in Sekunden, in welcher der aktuelle Befehl ausgeführt wurde. |
| • | Entfernung in Koordinateneinheiten für die Pfadstrecke. |
| • | Kurs in Grad (gegen den Uhrzeigersinn mit der x-Achse als 0 gemessene Konstanten). |
| • | Umdrehungen des Rads während der Ausführung des aktuellen Befehls |
| • | Befehlsanzahl, verfolgt die Anzahl der ausgeführten Befehle, beginnt mit 0. |
Die Pfadwerte werden in Listen gespeichert, beginnend mit den Strecken, die mit den früheren Befehlen verknüpft sind, und fortfahrend mit den Strecken, die mit den späteren Befehlen verknüpft sind.
Der laufende Antriebsbefehl, der WAYPOINT, aktualisiert wiederholt das letzte Element in den Pfadlisten, wenn der Rover sich in Richtung des letzten Wegpunkts bewegt.
Wenn ein Antriebsbefehl abgeschlossen ist, wird ein neuer Wegpunkt initiiert, und der Umfang der Pfadlisten nimmt zu.
Hinweis: Das bedeutet, dass automatisch ein neuer Wegpunkt für den angehaltenen Status gestartet wird, wenn alle Antriebsbefehle in der Warteschlange abgeschlossen sind. Dies ist ähnlich wie bei der Ausgangsposition, wenn der RV stationär ist und die Zeit misst.
Max. Anzahl an Wegpunkten: 80
RV-Position und Pfad
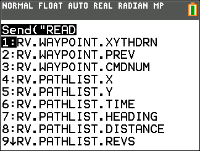
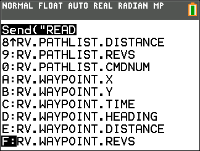
| • | Fähigkeit zum Lesen von x-, y-Koordinate, Kurs, Zeit und Entfernung für jeden ausgeführten Antriebsbefehl. |
| • | Der Pfadverlauf wird für Ausgabe und Analyse in Listen gespeichert. |
Hinweis: Die Koordinaten-Rasterskala kann vom Benutzer eingestellt werden, die Standardeinstellung beträgt 10 cm pro Einheit. Der Benutzer hat Optionen zum Einstellen des Rasterursprungs.
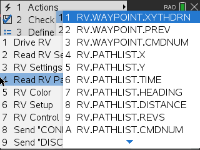
Befehle für Read RV Path ...
|
|
CE Taschenrechner
|
TI‑Nspire™ CX
|
![]()