In diesem Abschnitt werden mögliche Probleme sowie Anleitungen zu deren Lösung erörtert.
Wenn Sie zusätzliche Hilfe benötigen, wenden Sie sich an TI-Cares.
Problembehandlung TI-Innovator™ Hub
Was kann ich tun, wenn der TI CE-Graphikrechner bzw. das TI-Nspire™ CX-Handheld den TI-Innovator™ Hub nicht erkennt? Wenn ich meinen TI CE-Graphikrechner oder mein TI-Nspire™ CX-Handheld an den TI-Innovator™ Hub anschließe, leuchtet die grüne LED nicht.
| - | Vergewissern Sie sich, dass der Taschenrechner eingeschaltet ist. |
| - | Wenn Sie ein Mini-A-zu-Mini-B-USB-Kabel für den Anschluss eines Taschenrechners verwenden, verbinden Sie das B-Ende des Kabels mit dem Anschluss „DATA  B“ unten am B“ unten am |
| - | Der Taschenrechner muss die aktuelle Version des Betriebssystems aufweisen. |
| - | Vergewissern Sie sich, dass das USB-Kabel fest in den Taschenrechner eingesteckt ist. |
| - | Ziehen Sie das USB-Kabel vom TI-Innovator™ |
Was kann ich tun, wenn die TI-Nspire™ CX-Computersoftware den TI-Innovator™ Hub nicht erkennt?
| - | Vergewissern Sie sich, dass Sie die aktuelle Version der TI-Nspire™ CX-Software verwenden. Bei der neuesten Version wird ein Treiber installiert, mit dem der Computer den TI-Innovator™ |
| - | Schließen Sie den TI-Innovator™ Hub an den Anschluss „DATA B“ des TI-Innovator™-Ports an. |
| - | Ziehen Sie das USB-Kabel vom TI-Innovator™ |
| - | Wenn Sie nicht das mit dem TI-Innovator™ |
Wie kann ich den Hub ausschalten?
| - | Schalten Sie den Host-Taschenrechner oder -Computer aus. |
- ODER -
| - | Ziehen Sie das USB-Kabel ab. |
Was bedeutet es, wenn die Fehler-LED blinkt und aus dem Lautsprecher ein Ton zu hören ist?
Wenn die Fehler-LED blinkt und der Lautsprecher ertönt, liegt bei den an den TI-Innovator™
Warum wird ein Treiber für Silicon Labs CP210x auf meinem Computer installiert, wenn ich den TI-Innovator™ Hub anschließe?
Das TI-Innovator™
![]()
Problembehandlung bei integrierten Hub-Komponenten
Mein Programm funktioniert nicht mit der integrierten Komponente. Wie kann ich herausfinden, ob die Komponente nicht eventuell defekt ist?
| - | Laden Sie das Testprogramm herunter und führen Sie es aus, um die integrierte Komponente zu prüfen. |
| - | Überprüfen Sie, ob die im Programm verwendeten Werte innerhalb der von den integrierten Komponenten unterstützten Wertebereiche liegen. |
| - | RGB: Intensitätsgrad in einem Wertebereich zwischen 0 und 255 |
| - | Lautsprecher: Bereich zwischen 40 und 4000 Hz |
Warum schaltet sich die integrierte RGB-LED immer ab, wenn ich einen Ton über den Lautsprecher abspiele? Warum kann ich die integrierte RGB-LED während einer Klangwiedergabe nicht steuern?
Die integrierten COLOR/RGB- und SOUND/SPEAKER-Befehle können nicht gleichzeitig verwendet werden. Benutzerprogramme müssen auf den Abschluss des SOUND/SPEAKER-Befehls warten, bevor COLOR/RGB-Befehle an den TI-Innovator™
Der geräteeigene Helligkeitssensor misst variierende Werte, obwohl sich die Lichtquelle nicht ändert. Woran liegt das? Warum schwanken die Helligkeitsmesswerte zwischen Minimal- und Maximalwert, obwohl eigentlich ein konstanter Wert zu erwarten wäre?
LED-Lichtquellen produzieren ein hochfrequentes Flackern. Das menschliche Auge nimmt dieses Flackern nicht wahr. Der Helligkeitssensor jedoch erkennt das Flackern und registriert entsprechend unterschiedliche Messwerte.
![]()
Problembehandlung TI-Innovator™ Rover
Funktioniert mein Rover nicht wie beabsichtigt? Woran liegt das?
| - | Überprüfen Sie, ob der Rover geladen ist. |
| - | Überprüfen Sie, ob der Rover eingeschaltet ist. |
| - | Überprüfen Sie, ob alle Kabel befestigt sind. |
| - | Stellen Sie sicher, dass das Breadboard richtig konfiguriert ist (rotes Kabel auf der richtigen Seite). |
| - | Stellen Sie sicher, dass alle Breadboard-Pins gerade sind. |
| - | Stellen Sie sicher, dass Sie über die neueste Version von Sketch verfügen. |
| - | Stellen Sie sicher, dass Sie über die neueste Version des Betriebssystems verfügen. |
| - | Versuchen Sie, das Testprogramm zu verwenden. |
| - | Lassen Sie keine Gegenstände außer dem Taschenrechner auf dem Rover. |
Mein Rover bewegt sich nicht oder bewegt sich nicht richtig. Woran liegt das?
| - | Bei Verwendung des Stifthalters ist darauf zu achten, dass der Stift nicht so weit eingesteckt ist, dass er den Rover anhebt. |
| - | Rollen reinigen |
| - | Für beste Ergebnisse auf einer glatten, flachen Oberfläche verwenden. |
| - | Überprüfen Sie, ob die Ausrichtung den Erwartungen Ihres Programms entspricht. |
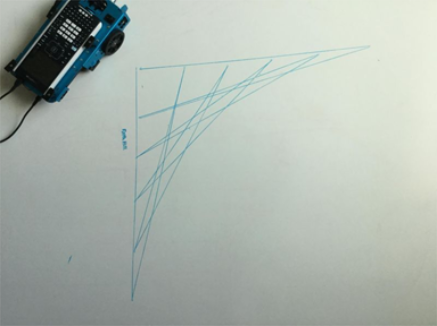
Der Rover hat nicht die von mir erwartete Form gezeichnet. Woran liegt das?
| - | Der Rover ist kein Präzisions-Zeichenwerkzeug. Bei bestimmten Formen sollten Sie eine gewisse Ungenauigkeit erwarten. |
| - | Beim Drehen kann der Rover eine Abweichung von +/- 0,5 Grad haben. Je höher die Anzahl von Segmenten (oder Drehungen) ist, desto größer kann diese Abweichung ausfallen. |
| - | Die für den Rover am besten geeigneten Oberflächen sind glatt und flach (kein Teppich, keine Fliesen). |
Was ist die empfohlene Anzahl von Segmenten oder Drehungen, um die erwartete Form zu zeichnen?
Es gibt zwei Methoden, um Formen (oder Funktionen) mit dem Rover zu zeichnen.
Für sie gelten verschiedenen Präzisionsgrade, was selbst für dieselben allgemeine Form (z. B. Achteck) zu unterschiedlichen Ergebnisse führen kann.
Methode 1: Verwendung von FORWARD/BACKWARD/LEFT/RIGHT: Diese Befehle bewegen den Rover um die eingegebene Entfernung und den eingegebenen Winkel. Die Winkelbewegung ist eventuell nicht präzise und hängt von der Oberfläche sowie der Anwesenheit des Markers ab.
Methode 2: Verwendung ‘TO XY’, ‘TO POLAR’: Diese Befehle bewegen den Rover zu bestimmten Koordinaten mit präziseren Drehungen. Selbst bei diesen Befehlen addieren sich kleine Fehler nach mehreren Segmenten auf. Funktionen und Formen, die eine große Gittergröße und/oder mehr als 18 Segmente verwenden, können zu einer Zeichnung führen, die nicht mit der erwarteten Form übereinstimmt.
Mein Rover dreht sich mehr oder weniger, als ich erwartet habe. Woran liegt das?
Es gibt zwei verschiedene Befehle im Zusammenhang mit der Drehung des Rover.
| - | Befehle RV LEFT/RV RIGHT: Diese Befehle weisen den Rover an, sich in dem festgelegten Winkel in Bezug zur seiner gegenwärtigen Position zu bewegen. |
| - | RV TO ANGLE: Dieser Befehl bewegt den spezifischen Winkel im Einheitskreis. |
Beispiele:
RV LEFT 30
RV LEFT 45
Führt für Rover zu einem Winkel von 75 Grad.
Im Vergleich
RV TO ANGLE 30
RV TO ANGLE 45
Führt für Rover zu einem Winkel von 45 Grad.
Achten Sie darauf, dass Ihr Programm den Bewegungsbefehl verwendet, der mit Ihren Erwartungen der Rover-Bewegung übereinstimmt.
Diese Befehle verwenden Grad als Voreinstellungseinheit auch dann, wenn die Rechnereinstellung in Radianten ist.
Sie können RADIANS oder GRADS (Gradianten) für Rover-Bewegungen mit Befehl über das “Hub -> Rover (RV) -> RV Settings”-Menü festlegen.
Der Rover bewegt sich nicht so weit, wie ich dachte. Woran liegt das?
Rover verwendet eine Voreinstellungseinheit von 10 cm.
Also bewirkt der Befehl „RV FORWARD 1“, dass Rover sich um 10 cm nach vorn bewegt.
Er ist äquivalent mit den Befehlen “RV FORWARD 1 UNITS” und “RV FORWARD 0.1 M”.
Um Rover über bestimmte Entfernungen zu bewegen, können Sie die Einstellung ‘M’ zur Festlegung der Meter verwenden.
Mein Marker wackelt im Markerhalter. Woran liegt das?
Der Markerhalter unterstützt übliche dünne Marker oder Trockenlöschmarker. Der Markerhalter ist so gestaltet, dass er die Schwerkraft dafür sorgen lässt, den Marker zu fixieren. Die Spitze des Markers bleibt auch dann am richtigen Ort, wenn sich das andere Ende des Markers bewegt.
In welche Richtung zeigt Rover, wenn ich ein Programm beginne?
Die Voreinstellungsposition des Rover ist der Ursprung eines Punktes in einem kartesischen Gitter die positive X-Achse abwärts.
Die ursprüngliche Orientierung ist: Position (0,0); in Richtung 0 Grad (ostwärts: zeigt zur positiven X-Achse).
ZU XY dreht zuerst zum richtigen Winkel und bewegt sich dann direkt zum Punkt.
Beispiel:
ZU XY 1 1 dreht 45 Grad nach links und bewegt sich dann um sqrt(2) Einheiten (@ 10 cm/Einheit = 14,14 cm).
Vgl. ferner Rover>Setup>SET RV.POSITION
Mit welchen coolen XY- oder Polarbefehlen kann man anfangen?
Table 1: Beispiel 1:
|
|
|
Warum wird mein Rover-Programm nicht der Reihenfolge nach ausgeführt?
Die Rover-Befehle fallen in zwei Kategorien:
| 1. | Ausführung nach Warteschlange: Alle Bewegungsbefehle des Rovers – FORWARD, BACKWARD, LEFT, RIGHT, ANGLE – befinden sich in der Warteschlange des TI-Innovator Hub. Sie können zu einem späteren Zeitpunkt ausgeführt werden. |
| 2. | Sofortige Ausführung: Andere Befehle, die beispielsweise Sensoren auslesen oder die RGB-LED auf dem Rover einstellen, werden sofort ausgeführt. |
Dies bedeutet, dass bestimmte Anweisungen vor Anweisungen, die früher im Programm erscheinen, in Ihrem Programm ausgeführt werden, vor allem, wenn die letzteren Befehle zu den Befehlen gehören, die in der Warteschlange ausgeführt werden.
Beispielsweise wird im nachfolgenden Programm die RGB-LED rot leuchten, bevor der Rover stoppt:
Send "SET RV.COLOR 255 0 255" – immediately executed
Send "RV FORWARD 5" – queued command
Send "RV LEFT 45" – queued command
Send "RV RIGHT 90" – queued command
Send "SET RV.COLOR 255 0 0" – immediately executed
Warum läuft mein Rover noch, obwohl mein Taschenrechner „Fertig“ ausgibt?
Dies kann passieren, wenn die Befehle zur späteren Ausführung in die Warteschlange gestellt werden. Der Taschenrechner gibt „Fertig“ aus, da die Programme alle Befehle an den TI-Innovator™ Hub gesendet haben. Der Hub führt die Befehle aus, um den Rover zu steuern, obwohl das Taschenrechnerprogramm abgeschlossen ist.
Mir wird keine Batterieleistung angezeigt, wenn ich meinen Rover anschließe. Woran liegt das?
Obwohl der Batterieladezustand normalerweise sofort angezeigt wird, kann es eine Minute dauern, bis der Batteriestatus angezeigt wird.
Mein Rover funktioniert nicht mehr und lässt sich nicht mehr einschalten. Was soll ich tun?
Laden Sie den Rover für ein paar Minuten und warten Sie, bis der Batteriestatus angezeigt wird.
Ich schalte den Rover aus, aber das Programm läuft noch oder Elemente auf dem Rover laufen noch. Woran liegt das?
Um den Rover vollständig zu deaktivieren, schalten Sie den Netzschalter auf OFF (Aus) und trennen Sie das USB-Kabel vom Graphikrechner.
Warum fährt mein Rover nicht in einer geraden Linie?
Dies kann passieren, wenn beide Motoren keine ähnliche interne Kalibrierung haben. Wir sind uns dieses Problems bewusst und arbeiten an einer Lösung über ein Update der Hub-Sketch-Software.
Mein Graphikrechner passt nicht auf den Rover.
Stellen Sie sicher, dass die Laschen korrekt ausgerichtet ist. Auf den Laschen befinden sich die Gravuren „CE“ und „CX“, die jeweils zu den Taschenrechnern der TI84Plus- und TI-Nspire-Serie passen.
Mein eingebauter Sensor funktioniert nicht. Liefert nicht die erwarteten Ergebnisse oder liefert keine Daten.
Beziehen Sie sich auf die Testprogramme.
Achten Sie auf lose Verbindungen.
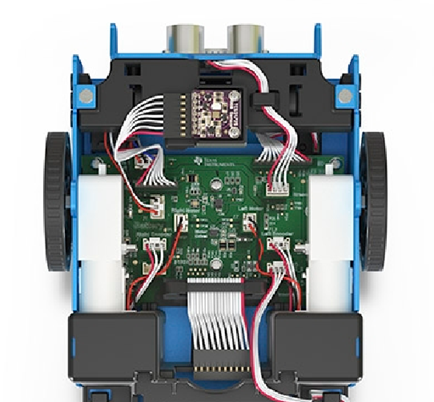
Mein Schüler hat alle Kabel getrennt, was kann ich tun?
Bitte beachten Sie den nachfolgenden Schaltplan.
Mein Rover bewegt sich langsamer oder dreht sich auf seltsame Weise.
| - | Überprüfen Sie die Rollen auf Schmutz. |
| - | Reinigen Sie die Rollen mit Druckluft. |
| - | Möglicherweise sitzen die Reifen nicht richtig. Prüfen Sie, ob diese vollständig auf den Rädern sitzen. |
| - | Es wird eine glatte und flache Oberfläche empfohlen. |
Meine Reifen sind abgefallen.
| - | Wie überprüfe ich, dass sie richtig auf den Rädern sitzen? |
Die Pins meines Breadboard sehen verbogen aus. Kann ich es noch nutzen?
Bitte richten Sie die Pins in der ursprünglichen Konfiguration neu aus, bevor Sie sie an den Hub anschließen.
Wofür sind die Befehle TO XY and TO POLAR? Wenn ich sie benutze, passiert nichts mit meinem Rover.
Diese Befehle werden in einer zukünftigen Version von Hub Sketch implementiert.
Wie kann ich anfangen? Beachten Sie, was der Rover kann.
| - | Demo: Programme, die etwas tun. Machen Sie eine Probefahrt. |
| - | Testprogramme: Testen Sie jeweils nur eine Komponente. Vergewissern Sie sich, dass diese funktioniert. |
![]()
Problembehandlung beim I/O-Modul
Das I/O-Modul für die weiße LED funktioniert nicht. Wie gehe ich vor?
Mit den folgenden Schritten können Sie ermitteln, ob mit dem I/O-Modul für die weiße LED etwas nicht in Ordnung ist.
| - | Prüfen Sie, ob die LED fest im Sockel sitzt. |
| - | Die LED an die Buchse anschließen – längerer Arm (Leitung) ist positiv (Anode). Wenn beide Leitungen gleich lang sind, ist die Leitung neben der flachen Ecke am LED-Gehäuse die negative Leitung (Kathode). |
| - | Laden Sie das Testprogramm herunter und führen Sie es aus, um die Modulkomponente für die weiße LED zu prüfen. |
| - | Prüfen Sie, ob das I/O-Modul an den vom Programm vorgeschriebenen Port angeschlossen ist. |
Das I/O-Modul für meinen analogen Lichtsensor funktioniert nicht. Wie gehe ich vor?
Mit den folgenden Schritten können Sie ermitteln, ob mit dem I/O-Modul für den analogen Lichtsensor etwas nicht in Ordnung ist.
| - | Laden Sie das Testprogramm herunter und führen Sie es aus, um die I/O-Modul-Komponente für den analogen Lichtsensor zu prüfen. |
| - | Prüfen Sie, ob das I/O-Modul an den vom Programm vorgeschriebenen Port angeschlossen ist. |
Das I/O-Modul für den Vibrationsmotor funktioniert nicht. Wie gehe ich vor?
Mit den folgenden Schritten können Sie ermitteln, ob mit dem I/O-Modul für den Vibrationsmotor etwas nicht in Ordnung ist.
| - | Laden Sie das Testprogramm herunter und führen Sie es aus, um die I/O-Modul-Komponente für den Vibrationsmotor zu prüfen. |
| - | Prüfen Sie, ob das I/O-Modul an den vom Programm vorgeschriebenen Port angeschlossen ist. |
Das I/O-Modul für den Servomotor funktioniert nicht. Wie gehe ich vor?
Mit den folgenden Schritten können Sie ermitteln, ob mit dem I/O-Modul für den Servomotor etwas nicht in Ordnung ist.
| - | Laden Sie das Testprogramm herunter und führen Sie es aus, um die I/O-Modul-Komponente für den Servomotor zu prüfen. |
| - | Vergewissern Sie sich, dass das I/O-Modul an OUT3 angeschlossen ist und das verwendete Programm OUT3 aufruft. |
| - | Bei Servomotoren muss der TI-Innovator™ Hub über eine externe Stromversorgung verfügen. Der PWR-Anschluss am Hub ermöglicht den Anschluss einer zusätzlichen Stromversorgungsquelle. Sie können das TI Ladegerät oder die externe Batterie verwenden. Für den TI-Innovator™ |
| - | Nach einer gewissen Zeit muss der Servomotor neu kalibriert werden. Schritte nur Neukalibrierung: |
| - | Verbinden Sie die externe Stromversorgung mit dem TI-Innovator |
| - | Schließen Sie den Servomotor an OUT3 an. |
| - | Senden Sie den Befehl „CONNECT SERVO 1 TO OUT3“. |
| - | Senden Sie den Befehl „SET SERVO 1 CW 0 TIME 100“ (hiermit wird die Geschwindigkeit auf 0 gesetzt; der Wert für Zeit (TIME) kann bei Bedarf erhöht werden). |
| - | Falls sich der Servo nicht bewegt, verschieben Sie das Potentiometer auf der Rückseite des Motors mit Hilfe eines Schraubenziehers bis zum Anschlag. |
Das I/O-Modul für meinen Ultraschall-Ranger funktioniert nicht. Wie gehe ich vor?
Mit den folgenden Schritten können Sie ermitteln, ob mit dem I/O-Modul für den Ultraschall-Ranger etwas nicht in Ordnung ist.
| - | Laden Sie das Testprogramm herunter und führen Sie es aus, um die I/O-Modul-Komponente für den Ultraschall-Ranger zu prüfen. |
| - | Prüfen Sie, ob das I/O-Modul an den vom Programm vorgeschriebenen Port angeschlossen ist. |
Der integrierte Helligkeitssensor und das I/O-Modul für den analogen Lichtsensor weisen leicht abweichende Messwerte auf. Woran liegt das?
Die Einbauposition des Sensors im TI-Innovator™
![]()
Problemlösung für TI-SensorLink
| • | TI-SensorLink ist keine Datenerhebungslösung. USB-verbundene Sonden oder Lab Cradle sind weiterhin eine überlegene Lösung zur reinen Datenerhebung und -analyse. |
| • | Die Hub-Befehle für den TI-SensorLink mit den analogen Verniersensoren sind gegenwärtig kein Teil der Hub App (CE-Familie) oder des Hub-Menüs (TI-Nspire™ CX). |
| • | Die neuen Befehle oder Schlüsselworte müssen entweder eingegeben ODER aus einem bestehenden Programm kopiert werden. Bitte beachten Sie, dass alle Schreibfehler in den Schlüsselworten zu einer Fehlermeldung in der Skizze führen. |
![]()
Problembehandlung rund um die Programmierung mit TI-Basic
Warum meldet mein Programm einen Syntaxfehler?
| - | Falls Sie Code aus einer externen Quelle oder einem Texteditor eingefügt haben, könnte er typographische Anführungszeichen („…“) an Stellen enthalten, an denen gerade Anführungszeichen ("…") erforderlich sind. Sie müssen eventuell einige oder alle typographischen Anführungszeichen ersetzen. |
| - | Die Syntaxregeln zwischen dem TI CE-Graphikrechner und der TI-Nspire™ CX-Technologie unterscheiden sich geringfügig. Code, der ursprünglich für die eine Plattform erstellt wurde, muss für die andere Plattform eventuell modifiziert werden. |
| - | Vergewissern Sie sich auf dem TI CE-Graphikrechner, dass sich an keinem Codezeilenende ein Leerzeichen befindet. Zum Auffinden dieser abschließenden Leerzeichen bewegen Sie den Cursor auf die Zeile und drücken die Taste [2nd] und die rechte Pfeiltaste. Auch benachbarte Leerzeichen im Code können einen Syntaxfehler verursachen. |
Wie beende ich ein Programm, das nicht mehr reagiert?
| - | TI CE-Graphikrechner: Drücken Sie die Taste ON. |
| - | TI-Nspire™ CX-Handheld: Halten Sie die Taste Home/ON gedrückt und drücken Sie wiederholt die Taste ENTER. |
| - | Windows®: Halten Sie die Taste F12 gedrückt und drücken Sie wiederholt die Eingabetaste. |
| - | Mac®: Halten Sie die Taste F5 gedrückt und drücken Sie wiederholt die Eingabetaste. |
In der TI-SmartView CE-Software werden die Hub-Befehle nicht im Programmiermenü angezeigt.
Überprüfen Sie, ob Sie die aktuelle Version (5.2) der TI-SmartView CE-Software verwenden. Diese Version installiert die App „
Warum werden die Hub-Befehle in der TI Connect™ CE-Software nicht angezeigt?
Die TI-Innovator™
Mein Programm weist keine Syntaxfehler auf, aber die Fehler-LED zeigt dennoch einen Fehler an.
Die Fehler-LED blinkt, wenn ein Fehler in der Befehlsstruktur vorliegt und Sketch die Befehle nicht verarbeiten kann. Sehen Sie sich die Beispielbefehle für die integrierten Systeme, I/O-Module und Breadboard-Komponenten daraufhin an, wie Sie Ihr Programm ändern könnten.
![]()
Problembehandlung rund um TI-Innovator™ Sketch
Warum erhalte ich einen Fehler, wenn ich versuche, TI-Innovator™ Sketch zu aktualisieren?
| - | Achten Sie bei Sketch-Updates darauf, das Standard-A-zu-Micro-B- statt des Standard-A-zu-Mini-B-USB-Kabels zu verwenden. Verbinden Sie das Micro-Ende des Kabels mit dem PWR-Anschluss oben auf dem Hub. |
Mein TI-Innovator™ Hub wird zwar mit Strom versorgt, kann aber nicht mit dem Update-Tool kommunizieren.
| - | Eventuell liegt ein Kabelproblem vor. Einige USB-Kabel enthalten nur Adern für Spannung, nicht aber für die Datenübertragung. |
| - | Verwenden Sie das Kabel aus dem Lieferumfang des TI-Innovator™ |
Benötige ich für das Sketch-Upgrade Administratorrechte auf meinem Computer?
Yes.
![]()
Problembehandlung rund um die externe Batterie
Meine externe Batterie scheint den TI-Innovator™ Hub nicht mit Strom zu versorgen.
| - | Prüfen Sie durch Drücken der Taste On/Off, ob die Batterie eingeschaltet ist. Die externe Batterie schaltet sich nach 3 Minuten automatisch ab, wenn keine Verbindung zum TI-Innovator™ |
| - | Prüfen Sie, ob die externe Batterie aufgeladen ist. Drücken Sie die Taste On/Off. Wenn die LEDs nicht leuchten, muss die externe Batterie aufgeladen werden. |
![]()